




Обзор алгоритмов управления асинхронными электроприводами
Автор: Сластиков Сергей Викторович
Рубрика: 3. Автоматика и вычислительная техника
Опубликовано в
III международная научная конференция «Технические науки в России и за рубежом» (Москва, июль 2014)
Дата публикации: 07.07.2014
Статья просмотрена: 1957 раз
Библиографическое описание:
Сластиков, С. В. Обзор алгоритмов управления асинхронными электроприводами / С. В. Сластиков. — Текст : непосредственный // Технические науки в России и за рубежом : материалы III Междунар. науч. конф. (г. Москва, июль 2014 г.). — Т. 0. — Москва : Буки-Веди, 2014. — С. 57-61. — URL: https://moluch.ru/conf/tech/archive/90/5693/ (дата обращения: 07.05.2024).
Современный асинхронный электропривод реализуется на базе силовой полупроводниковой техники с применением микропроцессорного управления. Его возможности позволяют организовать регулирование выходных координат электропривода в широком диапазоне, с высокой точностью и быстродействием.
Современные преобразователи частоты с микропроцессорным управлением позволяют реализовывать традиционные или создавать новые программные алгоритмы и синтезировать асинхронные электроприводы с широким набором эксплуатационных характеристик.
Цель: Обзор алгоритмов управления асинхронными электроприводами и выбор более подходящего алгоритма для тягового электропривода троллейбусов.
Основным условием для выбора алгоритма управления тяговым электроприводом троллейбуса это поддержание момента на валу двигателя, как при разгоне, так и при торможении. Так как мощность тягового электропривода большая необходимо учитывать тепловые потери. Исходя из этого, рассмотрим и сделаем анализ существующих алгоритмов управления
Векторное управление, ориентированное по роторному потоку, для асинхронного двигателя, питающегося от источника тока
Для создания источника тока, управление элементами инвертора определяются быстрыми местными петлями тока, контролируемыми заранее описанными мгновенными значениями фазовых токов
Двухфазные компоненты статорного тока в установленной системе координат (id*, iq*) полученных из петли управления скоростью (позицией). Они определяют мгновенные заранее описанные значения статорного тока (ia*, ib*, ic*), сравниваемые с реальными, измеренными, значениями статорных токов ia, ib, ic. Управление элементами инвертора (всегда для каждой фазы противоположные состояния) определяются таким образом, чтобы, независимо от каждой фазы, лимитировать частоту переключений, предусматривая гистерезис в процентах от максимального значения заранее описанного тока.
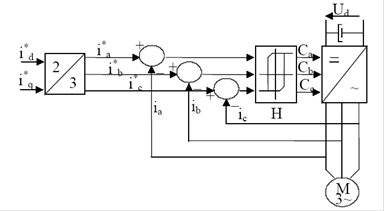
Рис. 1. Принцип широтной модуляции с реакцией по току
Главными преимуществами этой стратегии модуляции являются:
1. Простота реализации;
2. Возможность реализации на аналоговых компараторах;
3. Хорошие динамические характеристики;
4. Нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя.
Описанная стратегия имеет ряд недостатков:
1. Поскольку компараторы каждой фазы независимы, не существует способа генерации нулевого вектора напряжения;
2. На маленьких частотах существует тенденция появления переключений на высокой частоте в результате неправильной работы компаратора.
Система управления скоростью (позицией) вращения асинхронного двигателя в косвенной форме.
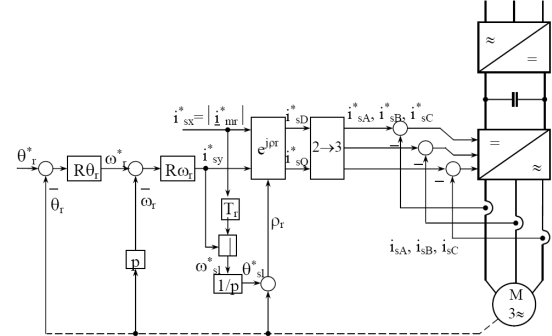
Рис. 2. Система управления позицией ротора косвенным методом
Регулятор позиции Rθr (пропорционального типа) перемещает заданное значение скорости ротора  , которое сравнивается с реальным значением скорости ротора ωr, а у регулятора скорости Rωr в качестве выходного параметра выступает активное значение тока статора i*sy.
, которое сравнивается с реальным значением скорости ротора ωr, а у регулятора скорости Rωr в качестве выходного параметра выступает активное значение тока статора i*sy.
На этой основе вместе с реактивной составляющей тока статора i*sx, рассчитывается частота скольжения. Полученная величина суммируется с позицией ротора и таким образом определяется позиция ρr вектора потока ротора.
Блоки (ejρr) и (2→3) осуществляют трансформацию координат из вращающейся системы в фиксированную, из двухфазных ортогональных значений в трехфазные:
Система управления скоростью (позицией) вращения асинхронного двигателя в непосредственной форме
В случае этого метода управления позиция ротора ρr, необходимая для трансформации координат, получается на основании измеренных значений токов статора, используя модель потока.
В результате получаются два пути управления: моментом (активный ток) и потоком (реактивный ток).
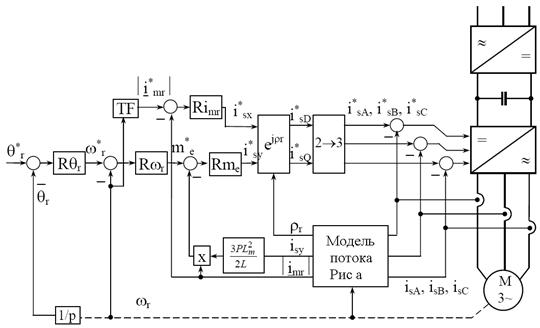
Рис. 3. Система управления позицией асинхронного двигателя прямым методом
В случае управления моментом заданной величиной может быть позиция или скорость ротора. В случае управления позицией её заданная величина θ*r сравнивается с измеренной, полученной в результате интегрирования скорости ротора. Разница между этими двумя параметрами передается регулятору позиции (пропорционального типа). Его выходное значение определяет заданное значение скорости вращения, которое сравнивается с реальной скоростью. Разница между этими двумя параметрами передается регулятору скорости (пропорционально интегрального типа), на выходе которого получается заданное значение электромагнитного момента. Значение момента сравнивается с измеренным параметром (рассчитанным на основании компонентов статорных токов в результате использования модели потока). Регулятор момента передает заданное значение активной составляющей статорного тока в систему потока ротора i*sy.
В случае управления потоком заданное значение тока намагничивания ротора, полученное на выходе трансформатора, сравнивается с измеренным значением, являющимся результатом работы модели потока. Результат сравнения используется регулятором реактивного тока, который в свою очередь передает заданное значение реактивной составляющей статорного тока в систему потока ротора i*sх.
Угол позиции вектора потока ротора, необходимого для трансформации координат (ejρr), получается из модели потока на базе измеренных значений статорных токов и скоростей ротора.
Представленные варианты схем управления применяются как для маленьких, так и для средних мощностей, где могут быть использованы инверторы напряжения с заданными токами. Соответственно, модуляция каждой фазы является результатом сравнения заданных фазных токов, полученных в схеме векторного управления, с измеренными значениями статорных токов. Поэтому, не во всех тяговых электроприводах троллейбусов возможно это использовать, поскольку троллейбусы выпускаются с разными мощностями электродвигателей.
Векторное управление с ориентацией по потоку ротора для асинхронного двигателя, питающегося от инвертора напряжения
В системах с большими и очень большими мощностями, из-за потерь при переключениях, невозможно использовать инверторы напряжения как источник тока, поэтому здесь используются инверторы напряжения как источник напряжения. Эти инверторы являются обобщенным случаем автоматических систем векторного управления с широтной модуляцией. Системы управления передают мгновенные заранее заданные значения фазных напряжений независимо от стратегии модуляции. Управление полупроводниковыми элементами осуществляется в зависимости от типа модуляции.
Считая машину ненасыщенной (постоянные индуктивности), электромагнитный момент асинхронного двигателя определяется компонентами статорных токов в различных системах координат. Так как инверторы напряжения являются источниками напряжения, а контроль моментом осуществляется статорными токами, необходимо осуществлять этот контроль посредством питающих напряжений. Таким образом, для управления моментом необходимо осуществить следующие преобразования: напряжение → ток → момент.
Система управления скоростью (позицией) асинхронного двигателя с заданием токов i*sx, i*sy
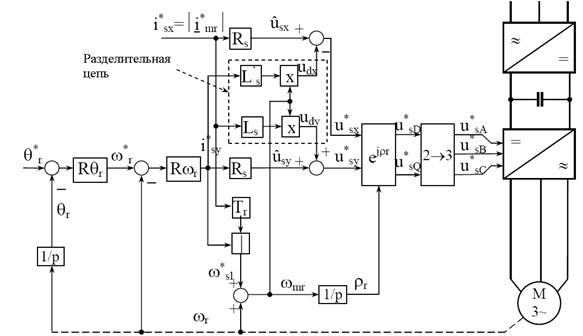
Рис. 4. Система управления позицией асинхронного двигателя с заданием токов i*sx, i*sy
Важен тот факт, что статорное сопротивление Rs, которое участвует в расчете компонентов ûsx, ûsy, не является лишь собственным сопротивлением двигателя, определяемое адекватными измерительными приборами, а эквивалентное сопротивление (большее) статора, включающее также сопротивления полупроводниковых элементов, находящихся в управлении, эквивалентное сопротивление промежуточной цепи, сопротивления проводников и др.
Блоки (ejρr) и (2→3) осуществляют трансформации координат из вращающейся системы координат в фиксированную, соответственно, из двухфазных ортогональных величин в трехфазные, используя в качестве переменных составляющие напряжения.
ЗАКЛЮЧЕНИЕ
В результате проведенного анализа схем видно, что метод, где инвертор выступает в качестве источника тока, позволяет «мягко» управлять как моментом, так и скоростью вращения, что позволяет добиться хороших динамических характеристик.
Другими преимуществами этой стратегии модуляции являются:
- простота реализации системы;
- возможность реализации на аналоговых компараторах;
- нечувствительность системы векторного управления скоростью к изменениям параметров асинхронного двигателя.
Однако реализация привода мощностью выше 10 кВт таким методом не является эффективной. Это связанно с тем, что частота переключений силовых элементов составляет порядка 10–20кГц, вследствие чего выделяется большое количество тепла на коллекторе IGBT транзистора. Следовательно он не может использоваться в тяговом электроприводе троллейбусов.
В схемах, где инвертор выступает в качестве источника напряжения, частота переключений может быть ниже 10кГц, в следствии количество тепла, выделяемое на инверторе, в 2 и более раза меньше, чем в предыдущем методе. Также преобразования проще, поскольку мы управляем только частотой и амплитудой напряжения.
Но при данном способе управления изменения параметров двигателя в процессе работы (изменение сопротивления и индуктивности обмоток) не позволяют добиться таких же динамических характеристик, как при управлении инвертором, выступающем в качестве источника тока.
Точность в электроприводе транспортных средств не самое важное: даже если скорость троллейбуса будет изменяться в пределах нескольких километров в час — это не существенно.
Исходя из этого, можно сделать вывод, что данный алгоритм управления походит для тягового электропривода троллейбусов.
Литература:
1. Шрейнер Р. Т. «Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты» Екатеринбург: УРО РАН, 2000
2. Соколовский Г. Г. «Электроприводы переменного тока С частотным регулированием» Москва: ACADEMA, 2006
Похожие статьи
Исследование системы векторного управления...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления...
Математическое моделирование электропривода на базе...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления...
Современные проблемы разработки электропривода
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия...
Пространственные векторы в асинхронном двигателе
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия...
Разработка частотно-регулируемого асинхронного...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора...
Пространственные векторы в асинхронном двигателе...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия...
Векторное управление активным выпрямителем напряжения
Исследование системы векторного управления... Такой системой координат является система координат
Рис. 2. Система управления позицией ротора косвенным методом.
Обратные преобразователи координат по статорным токам с номерами 15 и 16 на.
Частотно-регулируемый асинхронный электропривод буровой...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия...
Моделирование системы АИН ШИМ — асинхронный двигатель...
Функциональная схема системы трехфазный автономный инвертор с ШИМ – асинхронный двигатель приведен на рис. 1.
Рис. 10. Статорные токи в неподвижной системе координат на входе обратного преобразователя координат.
Похожие статьи
Исследование системы векторного управления...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления...
Математическое моделирование электропривода на базе...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления...
Современные проблемы разработки электропривода
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия...
Пространственные векторы в асинхронном двигателе
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия...
Разработка частотно-регулируемого асинхронного...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора...
Пространственные векторы в асинхронном двигателе...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия...
Векторное управление активным выпрямителем напряжения
Исследование системы векторного управления... Такой системой координат является система координат
Рис. 2. Система управления позицией ротора косвенным методом.
Обратные преобразователи координат по статорным токам с номерами 15 и 16 на.
Частотно-регулируемый асинхронный электропривод буровой...
асинхронный двигатель, система управления, векторное управление, трансформация координат, инвертор напряжения, тяговый электропривод троллейбусов, статорный ток, позиция ротора, случай управления, стратегия...
Моделирование системы АИН ШИМ — асинхронный двигатель...
Функциональная схема системы трехфазный автономный инвертор с ШИМ – асинхронный двигатель приведен на рис. 1.
Рис. 10. Статорные токи в неподвижной системе координат на входе обратного преобразователя координат.




