




Основы разработки регулятора эксплуатационных режимов хлопковых агрегатов
Авторы: Кулиев Курбангельды, Шаммедов Мердан Назарович
Рубрика: 16. Механизация и электрификация сельского хозяйства
Опубликовано в
Дата публикации: 06.07.2016
Статья просмотрена: 15 раз
Библиографическое описание:
Кулиев, Курбангельды. Основы разработки регулятора эксплуатационных режимов хлопковых агрегатов / Курбангельды Кулиев, М. Н. Шаммедов. — Текст : непосредственный // Инновационные технологии в сельском хозяйстве : материалы II Междунар. науч. конф. (г. Санкт-Петербург, июль 2016 г.). — Санкт-Петербург : Свое издательство, 2016. — С. 32-37. — URL: https://moluch.ru/conf/agr/archive/167/10788/ (дата обращения: 17.05.2024).
For maintenance of optimum operational indicators of plough and harvest units in cotton growing, it is necessary to support constant worker speed and corresponding capacity of the engine feed of fuel on the developed loading which is carried out by system of regulation of operational operating modes of units.
Keywords:capacity, the engine, loading, operation, cotton.
Исследованиями, установлены основные эксплуатационные возможности хлопковых пропашных агрегатов при возделывании и уборке хлопчатника. Характерно, что установленная по качественным показателям рабочая скорость агрегата при выполнении конкретной операции должна быть постоянной. При эксплуатации пропашных агрегатов загрузка двигателя трактора в зависимости от энергоемкости операций находится, в пределах 25–96 %. В связи со случайным характером внешней нагрузки коэффициент вариации составляет 6–15 %, и поэтому перегрузка двигателя практически не наблюдается. В перспективе работа двигателя с полной нагрузкой и перегрузкой из-за резкого повышения энергонасыщенности хлопковых современных тракторов также маловероятна. Следовательно, для обеспечения оптимальных эксплуатационных показателей пропашных и уборочных агрегатов в хлопководстве необходимо поддерживать постоянную рабочую скорость и соответствующую мощность двигателя подачей топлива по развиваемой нагрузке. Это можно осуществить системой регулирования эксплуатационных режимов работы агрегатов.
Выбор системы регулирования указанными эксплуатационными режимами возможен при точном определении их динамических свойств.
Статистическая динамика рассматривает объект исследования как систему со многими, входными и выходными переменными, отражающими различные условия работы объекта, его энергетические и технологические параметры, технико-экономические показатели. Хлопковые агрегаты можно представить как многомерные системы с входными и выходными параметрами, которые дадут характеристики исследуемых объектов.
Посевной агрегат представляет динамическую систему со многими входными и выходными параметрами. Однако рассматривая основные переменные, посевной агрегат можно представить двумерной системой. Входными возмущениями будут сопротивление в виде профиля поверхности поля и сопротивление почвы; выходом — момент на валу ведущего колеса.
Культиваторный агрегат так же, как и посевной, можно представить как динамическую систему с входным возмущением в виде сопротивления от неровности поверхности поля и сопротивления почвы и выходным — моментом на валу ведущего колеса.
Динамические свойства данных агрегатов можно выразить в виде какого-либо оператора W, который определяет, как система преобразует входные воздействия. Установление вида оператора W по соотношению,
Трудность заключается и в отсутствии методики определения исходной расчетной системы, а также примерного вида оператора как машины в целом, так и отдельных ее узлов. Практическое применение разработанной нами методики в расчете операторов хлопковых агрегатов сводится к построению условной колебательной системы, эквивалентной исследуемому объекту. В общем случае условные колебательные системы создают путем замены рассредоточенных масс деталей, или узлов исследуемого объекта приведенными сосредоточенными массами, путем отображения упругих свойств соединений пружинами, или торсионами, а трения в сочленениях — демпферами с заданными характеристиками (рис.1).
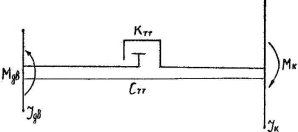
Рис. 1. Расчетная двухмассовая колебательная система, эквивалентная трансмиссии машины:Мк — крутящиймомент на полуоси ведущего колеса трактора, образующийся от сопротивления профиля поверхности поля и сопротивления сельскохозяйственной рабочей машины; Iк — суммарный момент инерции ведущих колес и поступательно-движущейся массы машины и рабочего агрегата; Мдв — крутящий момент двигателя; Iдв — момент инерции вращающихся масс двигателя; КТТ — коэффициент межупругого сопротивления трансмиссии трактора, приведенный к первичному валу коробки передач; СТТ — коэффициент податливости трансмиссии от колес до маховика двигателя
Математическое описание динамических характеристик двухмассовой (посевной и культиваторный агрегаты) колебательной системы выполняется нами на основании второго закона Ньютона для вращательного движения. Применяя принцип Германа-Эйлера-Даламбера [1] для механической системы, в окончательном виде уравнения движения системы представляются в следующем виде [2, 3]:
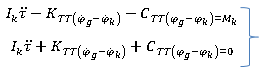
Рассмотрев подробное решение для двухмассовой системы, приводим основные результаты.
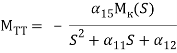
Передаточная функция для посевного и культиваторного хлопковых агрегатов определяется решением полученного уравнения
![]()
![]()
Тогда
 ,
,
Аналитически полученные уравнения хлопковых агрегатов, имеющих двухмассовую колебательную систему в виде дробно-рациональных передаточных функций, позволяет непосредственно перейти к исследованиям динамических характеристик, вопросов оптимизации и регулирования их эксплуатационных режимов.
Анализ условий работы хлопковых агрегатов показывает, что наиболее приемлемыми принципами регулирования являются регулирования по возмущению, которые характеризуются использованием явления компенсации возмущений [4]. При этом сигнал изменения крутящего момента на полуоси ведущего колеса, или на выходном валу трансмиссии (редуктора) идет непосредственно к рейке топливного насоса, которая и определяет степень корректирования эффективной мощности двигателя в зависимости от нагрузки. Одновременно такой же сигнал поступает к исполнительному механизму для изменения передаточного числа трансмиссии в связи с изменением числа оборотов двигателя и поддержанием постоянными заданных поступательной скорости и частоты вращения рабочих органов агрегата. Такой принцип регулирования почти исключает запаздывание поступления сигнала.
В теории и практике регулирования математическим выражением явлений компенсации возмущений утвердился принцип инвариантности, под которым понимается достижение полной или частичной независимости поведения рассматриваемой регулируемой системы от действующих на нее возмущений. Практически реализация указанной независимости поведения системы регулирования связана с изменением или использованием возмущений. Задачей измерения возмущений или их обнаружения является стремление погасить вредное влияние возмущений за счет их воздействий на систему.
Экспериментально установлено, что все рассматриваемые хлопковые агрегаты работают на режимах постоянной скорости движения и частоты вращения рабочих органов. При этом двигатели агрегатов работают с недогрузкой (от 10 до 60 %). Для поддержания оптимального нагрузочного режима двигателя необходимо, используя свойства всережимного регулятора, перейти на режим, соответствующий максимальному использованию эффективной мощности двигателя. Однако в этом случае падают скорость агрегата и скоростной режим рабочих органов, что резко ухудшает качество выполнения технологической операции. Таким образом, возникает необходимость в совместном регулировании постоянства рабочей скорости, кинематических режимов рабочих, органов и загрузки двигателя для качественного выполнения операции. Выполнение операции на оптимальных эксплуатационных режимах возможно при поддержании заданных кинематических режимов рабочих органов и поступательной скорости агрегата, независимо от предела изменения скоростного режима двигателя. В целом сигналы от возмущения посевного и культиваторного агрегатов поступают в двигатель от сопротивлений неровности поверхности поля и почвообрабатывающих органов через полуось ведущего колеса трактора.
На основе возникшей задачи регулирования нами разработана универсальная структурная схема системы регулирования эксплуатационных режимов хлопковых агрегатов по взаимосвязи постоянства скорости движения трактора и оптимальной по расходу топлива мощности двигателя. Она состоит из взаимодействующих элементов, предназначенных для регулирования в оптимальных пределах в соответствии с внешней нагрузкой скорости вращения коленчатого вала двигателя и поддержания постоянной поступательной скорости движения трактора и кинематических режимов рабочих органов.
Структурная схема (рис.2) состоит из двигателя (Дв) и вариатора (Вр) — регулируемых объектов и системы регуляторов непрямого действия. Принцип действия такого регулятора состоит в том, что чувствительные элементы — датчики моментов (ДМ) связаны с органами управления через усилительные элементы — золотники (З1, 32) и гидроцилиндры (ГЦ1и ГЦ2), являющиеся одновременно и исполнительными элементами. Действие возмущений учитывает передаточная функция W (S).
Основной структурный признак разработанной инвариантной системы регулирования — замкнутость цепи воздействия, а условия инвариантности реализуются распространением внешних воздействий между местом их приложения и регулируемой координатой (частотой вращения коленчатого вала двигателя и стабилизатором скорости трансмиссии) по двум каналам.
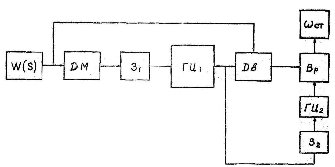
Рис. 2. Структурная схема системы регулирования эксплуатационных режимов хлопковых агрегатов
![]()
![]()
![]()
![]() Литература:
Литература:
- Яблонский А. А. Курс теоретической механики. М.: Высшая школа, 1976. Ч.2.
- Иванов В. А. и др. Математические основы теории автоматического регулирования. М.: Высшая школа, 1971.
- Чернецкий В. И. Математические методы, и алгоритмы исследования автоматических систем. Л.: Энергия, 1970.
- Уланов Г. М. Статистические и информационные вопросы управления по возмущению. М.: Энергия, 1970.
Похожие статьи
Особенности технологии и эксплуатационных параметров...
Культиваторный агрегат так же, как и посевной, можно представить как динамическую систему с входным возмущением в виде сопротивления от неровности поверхности поля и сопротивления почвы и выходным — моментом на валу ведущего колеса.
Регулирование режима работы газоперекачивающих агрегатов...
Расчёт характеристик системы автоматического управления... Структурная схема системы автоматического регулирования скорости вращения турбины представлена на рис. 3. Здесь на вход в систему в сумматоре. Произведение передаточных функций возмущающего...
Методика определения энерготехнологических параметров...
Методика определения энерготехнологических параметров почвообрабатывающих агрегатов с учетом террадинамического сопротивления рабочих органов. Авторы: Джабборов Нозим Исмоилович, Захаров Антон Михайлович.
Система управления скоростью (позицией) вращения...
Посевной агрегат представляет динамическую систему со многими входными и выходными параметрами. Структурная схема (рис.2) состоит из двигателя (Дв) и вариатора (Вр).
Основы разработки регулятора эксплуатационных режимов...
Эквивалентная расчетная схема трансмиссии хлопковой машины
Рис. 1. Колебательная система, эквивалентная трансмиссии хлопковой машины.
, , , , и -моменты инерции соответственно вращающихся масс двигателя, вращающихся масс коробки переменных передач, главной передачи и дифференциала, ведущих колес трактора и...
Математическая модель процесса трелевки лесоматериала...
Передаточная функция для посевного и культиваторного хлопковых агрегатов определяется решением полученного уравнения. Определение тягового сопротивления при обработке...
Оценка энергетических параметров агрегата для глубокой...
Рис. 2. Расположение рабочих органов в 1 ряд (угол атаки рабочих органов 81º, вид справа). Как известно, внешними воздействиями МТА являются конструктивные, технологические и эксплуатационные факторы (сопротивление почвы, профиль поверхности поля...
Информационная модель систем гусеничной машины для...
Давление в топливной системе создается и поддерживается независимо ни от частоты вращения коленчатого вала двигателя... Экспериментальный стенд для исследования автомобильного...
Похожие статьи
Особенности технологии и эксплуатационных параметров...
Культиваторный агрегат так же, как и посевной, можно представить как динамическую систему с входным возмущением в виде сопротивления от неровности поверхности поля и сопротивления почвы и выходным — моментом на валу ведущего колеса.
Регулирование режима работы газоперекачивающих агрегатов...
Расчёт характеристик системы автоматического управления... Структурная схема системы автоматического регулирования скорости вращения турбины представлена на рис. 3. Здесь на вход в систему в сумматоре. Произведение передаточных функций возмущающего...
Методика определения энерготехнологических параметров...
Методика определения энерготехнологических параметров почвообрабатывающих агрегатов с учетом террадинамического сопротивления рабочих органов. Авторы: Джабборов Нозим Исмоилович, Захаров Антон Михайлович.
Система управления скоростью (позицией) вращения...
Посевной агрегат представляет динамическую систему со многими входными и выходными параметрами. Структурная схема (рис.2) состоит из двигателя (Дв) и вариатора (Вр).
Основы разработки регулятора эксплуатационных режимов...
Эквивалентная расчетная схема трансмиссии хлопковой машины
Рис. 1. Колебательная система, эквивалентная трансмиссии хлопковой машины.
, , , , и -моменты инерции соответственно вращающихся масс двигателя, вращающихся масс коробки переменных передач, главной передачи и дифференциала, ведущих колес трактора и...
Математическая модель процесса трелевки лесоматериала...
Передаточная функция для посевного и культиваторного хлопковых агрегатов определяется решением полученного уравнения. Определение тягового сопротивления при обработке...
Оценка энергетических параметров агрегата для глубокой...
Рис. 2. Расположение рабочих органов в 1 ряд (угол атаки рабочих органов 81º, вид справа). Как известно, внешними воздействиями МТА являются конструктивные, технологические и эксплуатационные факторы (сопротивление почвы, профиль поверхности поля...
Информационная модель систем гусеничной машины для...
Давление в топливной системе создается и поддерживается независимо ни от частоты вращения коленчатого вала двигателя... Экспериментальный стенд для исследования автомобильного...




