




В настоящей работе на примере разрабатываемой на предприятии аэродромной РЛС посадки рассмотрен процесс формирования ее технического облика и выбора системотехнических решений, который проводился на основе анализа предъявляемых потребителем требований. Приведен итоговый технический облик системы, и обозначены его преимущества перед радиолокаторами, разрабатываемыми с использованием «классических» решений (сканирующие импульсные системы).
Ключевые слова: посадочный радиолокатор, технический облик радиолокатора, анализ требований к системе
Набор требований к любой технической системе формируется исходя из потребностей и пожеланий конечного потребителя и отображается в техническом задании на систему. Однако анализ причин разной степени продвижения новых товаров на рынке показывает, что в современных условиях успех новой продукции на 70–90 % зависит от точности соответствия предпочтениям потребителей и лишь 10–30 % обусловлен техническими или технологическими факторами [1].
Достижение тех или иных характеристик системы, необходимых заказчику, возможно путем реализации различных технических решений, при этом довольно часто разработчики вынуждены идти на компромисс, отказываясь в разумных пределах от некоторых характеристик продукта с целью совершенствования других.
В связи с этим разработка новой системы под потребности заказчика должна начинаться не с подбора и оптимизации имеющихся готовых решений, а со всестороннего анализа требований к данной системе и выбора системотехнических решений, позволяющих достичь максимального соответствия поставленным требованиям.
В работе представлен процесс формирования технического облика новой радиолокационной системы на основе анализа требований к ее основным функциям, на примере аэродромной РЛС посадки.
Формулирование требований ксистеме ифункциональный анализ
Посадочный радиолокатор (ПРЛ) представляет собой радиолокационную систему аэродромного базирования, расположенную по центру взлетно-посадочной полосы (ВПП) и в непрерывном режиме контролирующую довольно ограниченную зону захода на посадку для воздушных объектов (ВО) [2]. В рамках настоящей работы рассмотрены требования к основному, информационному функционалу ПРЛ. Требования, относящиеся непосредственно к функционированию системы, но не связанные с реализацией основного ее предназначения (надежность, ремонтопригодность, климатическая устойчивость и т. п.), при грамотном проектировании и конструировании являются заведомо реализуемыми.
Главной и основной задачей, которую выполняет любое радиолокационное средство, является предоставление конечному потребителю информации о наличии в заданной зоне ответственности (ЗО) объектов различного типа, их местоположении и параметрах движения. При этом состав информационных сообщений определяется как потребностями потребителя, так и техническими решениями и программно-алгоритмическим обеспечением, заложенными в системе. Исходя из этого, базовым требованием к выбранному техническому решению становится перечень первичной информации, доступной при его реализации.
Для формирования технического облика системы необходимо до определённого, достаточного для выбора технического решения, уровня декомпозировать требования к ней, поставив в соответствие к каждому требованию выполняемую системой функцию. На основе полученных данных формируется множество альтернатив, позволяющих реализовать искомый функционал, из которых уже делается осознанный выбор решения (в общем случае, с учетом экономических показателей эффективности).
Исходя из этого, главное требование к системе — обеспечение информацией об отклонениях ВО в зоне посадки — может быть представлено как реализация следующего минимального набора функций системы:
– формирование радиолокационного поля, покрывающего требуемую ЗО;
– обнаружение различных объектов, находящихся в ЗО;
– измерение параметров движения обнаруженных в ЗО объектов;
– расчет отклонения местоположения обнаруженных ВО от заданных значений для участка траектории маневра посадки;
– выдача информации конечному потребителю.
При этом выполнение ряда функций определяется непосредственно аппаратурной частью системы, а часть функций зависят от программной реализации. Те функции, выполнение которых реализуется на уровне программного обеспечения, в настоящей работе не рассматриваются.
На основе подлежащих реализации функций системы формулируются исходные требования, которые фиксируются в технических заданиях (или итоговых спецификациях системы) с указанием конкретных числовых значений. Для ПРЛ в качестве типичных можно рассматривать следующие значения характеристик, отвечающих за реализацию исходных требований:
– зона обзора — 10 градусов по углу места, 30 градусов по азимуту, не менее 40 км по дальности;
– темп обновления информации — не более 1 секунды;
– точность определения пространственного местоположения ВО — не хуже 0.6 градуса по углу места, 1.2 градуса по азимуту и 100 м по дальности;
– диапазон рабочих температур — от минус 50°C до плюс 50°C.
Таким образом, при формировании технического облика ПРЛ следует учесть необходимость выполнения приведенных выше требований.
Анализ возможных системотехнических решений
Задача приема отраженных от объектов эхо-сигналов в пределах заданной ЗО ПРЛ может быть решена несколькими различными способами, имеющими как свои преимущества, так и недостатки:
1 механическое сканирование пространства путем вращения антенных систем с узким лучом диаграммы направленности;
2 электронное сканирование пространства фазированной антенной решеткой;
3 цифровое формирование диаграмм направленности, позволяющее строить все направления одновременно.
При этом сам процесс сканирования обуславливает необходимость излучения мощности в определенный момент времени в заданном направлении, для синхронизации с приемной системой.
Тем не менее, системы с механическим сканированием в настоящее время являются наиболее изученными и, как следствие, наиболее распространенными. В качестве примера можно привести RP-5GN (Tesla) [3] и отечественную РСП-10МН [4]. Конструктивно данные ПРЛ представляют собой две зеркальные антенны, выполняющие сканирование в азимутальной и угломестной плоскостях по заданному алгоритму, с последующей обработкой данных посредством аппаратуры вычислительного комплекса, расположенной отдельно в аппаратурном контейнере. При этом данные системы построены на общеизвестных принципах импульсной радиолокации: на время излучения зондирующего сигнала приемники выключаются, после излучения идет прием отраженных эхо-сигналов в отсутствии излучения.
В качестве систем с электронным сканированием пространства можно привести систему ПРЛ «Низовье» [5], в основе работы который лежит принцип частотного сканирования пространства и применение плоской антенной решетки.
Однако сама идея сканирования пространства в импульсном режиме, особенно при разработке систем с относительно небольшой дальностью действия, имеет ряд недостатков:
– усложнение конструкции системы и алгоритмов управления ее подсистемами;
– ограничения по минимальной дальности обнаружения объекта (в соответствии с минимальной длительностью зондирующего импульса);
– необходимость обслуживания и относительно частого проведения регламентных работ подвижных антенн (в случае механического сканирования), что связано с выведением изделия из эксплуатации и с затратами на регламентное обслуживание;
– ограниченное время облучения цели, что затрудняет выполнение доплеровской селекции целей при работе условиях помех и отражений от местных предметов, а также ограничивает возможности длительного когерентного накопления сигнальных данных.
Выбор типа зондирующего сигнала под требуемое значение разрешающей способности системы по дальности до объекта рассмотрен во многих работах, например, в [6]. Кроме того, для существует ряд программных средств, позволяющих исходя из требований к системе предложить оптимальную форму зондирующего сигнала (например, MATLAB, [7]). Тип зондирующего сигнала определяет также архитектуру и требуемые мощности вычислительных средств, однако в настоящее время это не является критическим узлом при разработке системы.
Формирование технического облика
При выборе технических решений, на основе которых будет изготовлена новая система, следует учитывать, что данное решение применяется к системе в целом. Например, если выбор сделан в пользу приемных антенн с механическим сканированием, то и передающая часть должна подсвечивать определенные области ЗО по реализованному в части приема сигнала алгоритму (тоже реализован алгоритм сканирования пространства).
В таблице 1 приведен сравнительный анализ основных потребительских свойств системы при реализации разных подходов к разработке.
Таблица 1
Сравнение потребительских свойств РЛС для различных системотехнических решений
|
Механическое сканирование |
Электронное сканирование |
Многолучевые цифровые диаграммы |
||
|
Наличие минимальной дальности обнаружения |
Определяется длительностью импульса зондирующего сигнала |
Отсутствует |
||
|
Минимальное время обзора ЗО |
Определяется алгоритмом сканирования, вычислительными мощностями |
Определяется длительностью приема сигнала и вычислительными мощностями |
||
|
а также возможностями механической части |
||||
|
Максимальное число наблюдаемых ВО |
Определяется скоростью сканирования и вычислительными мощностями |
Определяется исключительно вычислительными мощностями |
||
|
Точности определения местоположения ВО |
Одинаковые, достаточные потребителю |
|||
|
Возможность доплеровской селекции ВО |
На этапе вторичной или межпериодной обработки |
По единичными измерениям |
||
|
Частота и стоимость регламентного обслуживания |
Высокая |
Средняя |
Низкая |
|
|
Общая стоимость разработки |
Соизмерима для различных решений (по экспертным оценка стоимость разработки системы с многолучевыми ДН может быть незначительно (15–20 %) выше стоимости разработки) |
|||
Таким образом, анализ степени удовлетворения потребностей заказчика, которая достигается каждым из предложенных системотехнических решений, говорит о том, что она максимальна при реализации многолучевых цифровых диаграмм направленности (параллельном, а не последовательном, обзоре пространства).
В качестве источника зондирующего сигнала используется передающий модуль с антенной, который облучает всю зону действия ПРЛ в режиме постоянного излучения.
Для приёма используются две цифровые фазированные антенные решетки (ФАР) для одновременного и независимого измерения углового местоположения объекта в азимутальной и угломестной плоскостях, каждая из которых имеет набор плоских диаграмм направленности (ДН), сформированных в цифровом виде. Таким образом, каждый объект в ЗО ПРЛ облучается зондирующим сигналом непрерывно, а две приёмные ФАР (каждая из которых имеет одновременно весь набор плоских ДН, изображенных на рисунке 1) производят угловые измерения курса и глиссады.
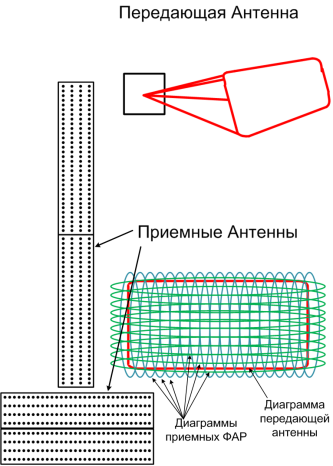
Рис. 1. Диаграммы направленности приемных и передающей ФАР
Данное системотехническое решение имеет следующие преимущества:
- Конструкция передающей части предельно упрощается, она становится неуправляемой и с фиксированной мощностью излучения;
- Каждая цель может облучаться сигналом в течение длительного времени (вплоть до периода обновления радиолокационной информации), что кардинально повышает возможности по доплеровской селекции.
- Отсутствует необходимость оперативного управления антенной системой, не требуется управлять лучами (т. е. на передачу работает ровно один луч, а на приём одновременно все лучи).
ПРЛ, при построении его по указанной схеме, будет состоять из следующих функциональных подсистем:
– передающее устройство (в составе усилителя мощности и ФАР с фиксированной ДН);
– два комплекта приемных ФАР в комплекте с малошумящими усилителями;
– модули приема и оцифровки радиолокационных сигналов;
– модуль цифрового формирования диаграмм направленностей приемных ФАР;
– вычислительный комплекс;
– средства отображения, управления и контроля.
Размещение приемной аппаратуры, чувствительной ко всевозможным климатическим воздействиям, возможно как в конструктиве антенн, так и в оборудованном климатической системой аппаратурном контейнере, включающем в себя наиболее чувствительную к ним аппаратуру вычислительного комплекса и средства отображения и управления. Внешний вид действующего макета ПРЛ, разработанного в ОАО «НПК «НИИДАР» и используемого для отработки предложенного системотехнического решения, приведен на рисунке 2.

Рис. 2. Демонстрационный макет ПРЛ/демонстратор технологии
Подобная реализация, существенно отличающаяся от предыдущих разработок как в конструктивном, так и в программно-алгоритмическом плане, требует выявления критических элементов системы, проведения анализа ее показателей надежности, в том числе с точки зрения вариантов изготовления и размещения в изделии критичных подсистем.
В то же время, необходимые заказчику потребительские свойства ПРЛ получаются не хуже (а, по некоторым характеристикам, даже превосходят), чем у существующих систем. В случае же рассмотрения затрат на систему на всем ее жизненном цикле за счет малого и нечастого регламентного обслуживания становиться очевидной экономическая целесообразность описанных в работе технических решений.
Заключение
Разработанный на основе выбранных по результатам анализа требований к системе системотехнических решений демонстрационный макет ПРЛ позволил оценить потенциальную достижимость требуемых потребителю технических характеристик. Анализ потенциальных характеристик, достижимым при реализации предлагаемой технологии построения системы, в том числе с учетом экономической эффективности разработки, демонстрирует ее привлекательность и для решения других задач, связанных с мониторингом ближней области пространства, в том числе в условиях множественных, малоразмерных или высокоманевренных целей.
Литература:
- Шмелева Ю. А. Принципы взаимодействия предприятия с потребителями на этапе разработки нового товара// Проблемы современной экономики. — 2011. — № 3. — С. 181–184
- Большаков Ю. П., Нечаев Е. Е. Посадочные радиолокаторы гражданской авиации и тенденции развития техники их построения // Научный вестник Московского государственного технического университета гражданской авиации. — 2005. — № 96. — С. 97–102
- RP-5G [электронный ресурс]// URL: http://www.radartutorial.eu/19.kartei/03.atc/karte026.en.html (дата обращения: 10.04.2019)
- Лобачев Ю. В., Худобин В. А. Посадочный радиолокатор ПРЛ-10 МН. Учебное пособие по курсу радиолокационные системы. — 2004. — 89с.
- Николаев С. Ф., Синицын Е. А., Синицын В. А. Радиолокатор «Низовье» обеспечит безопасность на взлетной полосе// Инновации — 2009. — № 9 — С. 18–19
- Ширман Я. Д., Теоретические основы радиолокации // М.: изд-во «Советское радио» — 1970. — стр. 560
- Waveform Design and Analysis [электронный ресурс]// URL: mathworks.com/help/phased/waveform-design-and-analysis.html
