





Потребность в регулировании скорости асинхронного двигателя переменного тока возникает в определенных промышленных областях и этого часто трудно достичь, потому что асинхронные двигатели имеют фиксированную скорость. Доступные методы управления, такие как изменение напряжения питания, изменение числа полюсов, характеризуются низкой эффективностью и высокой стоимостью обслуживания. Совершенствование технологии силовой электроники благодаря развитию полупроводниковых электронных устройств с повышенной надежностью и относительно невысокой стоимостью привело к разработке современного твердотельного электропривода, который представляет собой электронное устройство, способное управлять скоростью асинхронного двигателя путем изменения частоты с повышенной эффективностью, надежностью и низкой стоимостью обслуживания. В этой статье проведены моделирование и анализ производительности такого частотно-регулируемого привода с использованием модели Matlab / Simulink. Успешно достигнут контроль скорости асинхронного двигателя, изменением частоты приложенного переменного напряжения, с применением метода широтно-импульсной модуляции.
Ключевые слова: асинхронный двигатель, инвертор, модель Matlab / Simulink, широтно-импульсная модуляция, частотно-регулируемый привод.
The need for variable speed of an ac induction motor arises in certain industrial applications and this is often difficult to achieve because induction motors are of fixed speed. The available control techniques such as variation of supply voltage, variation of number of poles, are characterized by low efficiency and high maintenance cost. The improvement in power electronics technology through advancements in semi-conductor electronic devices with increased reliability and reduced cost led to the development of modern solid-state variable frequency motor drive which is an electronic device capable of controlling the speed of an induction motor by varying the frequency with increased efficiency, reliability and low maintenance cost. This paper carried out the modelling, simulation and performance analysis of such a variable frequency drive using matlab /simulink model. It successfully achieved the control of the speed of the induction motor from zero to the nominal speed by varying the frequency of the applied ac voltage using pulse width modulation method.
Keywords: Induction Motor, Inverter, matlab/simulink model, Pulse Width Modulation, Variable Frequency Drives.
I. Работа преобразователя частоты
Основной принцип работы частотно-регулируемого привода (ЧРП) требует понимания трех основных разделов: блока выпрямителя, шины постоянного тока и блока инвертора, как показано на рисунке 1 [1]. Напряжение питания сначала передается через блок выпрямителя, где оно преобразуется из переменного тока в постоянный; трехфазный переменный ток подаётся на двухволновый диодный мост, где он преобразуется в источник постоянного тока. Шина постоянного тока содержит секцию фильтра, в которой отфильтровываются гармоники, генерируемые во время преобразования переменного тока в постоянный. Последняя секция состоит из секции инвертора, которая содержит шесть биполярных транзисторов с изолированным затвором (IGBT), где отфильтрованный постоянный ток преобразуется в квазисинусоидальную волну переменного тока, которая подается на подключенный к нему асинхронный двигатель [2]. Известно, что синхронная скорость электродвигателя зависит от частоты. Поэтому, изменяя частоту электропитания через ЧРП, можно контролировать скорость двигателя
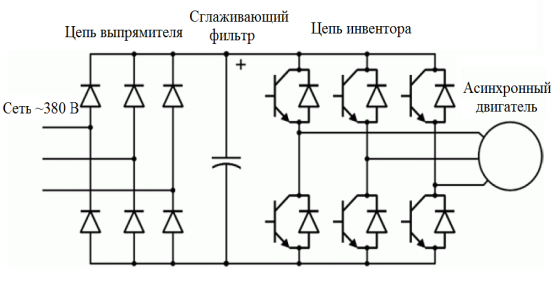
Рис. 1. Схема цепи частотно-регулируемого привода
Скорость (об/мин) 𝒏𝒓 = ![]() (1)
(1)
где; f = электрическая частота источника питания в Гц, p = количество электрических полюсов в статоре двигателя [3]. График зависимости частоты и скорости ротора представлен на рисунке 2.
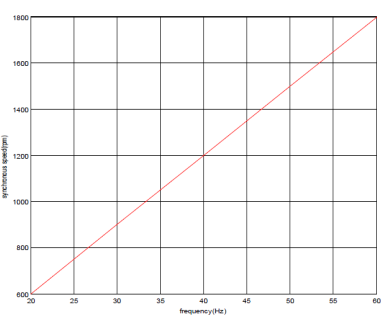
Рис. 2. график зависимости скорости вращения ротора от частоты
Таким образом, мы можем удобно регулировать скорость двигателя, изменяя частоту, приложенную к двигателю и сохраняя число полюсов постоянным. Обеспечение необходимой частоты и напряжения на выходе из ЧРП осуществляется с помощью широтно-импульсной модуляции. Инвертор с широтно-импульсной модуляцией (ШИМ) вырабатывает импульсы различной ширины, которые объединяются для построения требуемой формы волны переменного тока. [4].
Все преобразователи частоты поддерживают постоянное отношение выходного напряжения к частоте (V / f). Причиной является то, что фазовое напряжение V, частота f и магнитный поток Φm двигателя связаны уравнением:
V = 4.444 f NΦm
или ![]() = 4.444NΦm
= 4.444NΦm
где N = число оборотов статора на фазу.
Φm = магнитный поток
Если такое же напряжение прикладывается на пониженной частоте, магнитный поток будет увеличиваться и насыщать магнитный сердечник, значительно искажая работу двигателя. Магнитного насыщения можно избежать путем сохранения постоянным магнитного потока Φm. Кроме того, крутящий момент двигателя является произведением магнитного потока статора и тока ротора. Для поддержания номинального крутящего момента на всех скоростях, постоянный поток должен поддерживаться в номинальном значении, которое достигается путем поддержания постоянного отношения напряжения к частоте (V / f).
Поддержание частоты и напряжения на выходе, необходимых для изменения скорости двигателя, достигается с помощью приводов с широтно-импульсной модуляцией. Инвертор с широтно-импульсной модуляцией (ШИМ) вырабатывает импульсы различной ширины, которые объединяются для создания требуемой формы волны. Как показано на рис.3 диодный мост используется в некоторых преобразователях для уменьшения гармоник. ШИМ создает текущую форму волны, которая более точно соответствует линии источника, который уменьшает нежелательный нагрев. ШИМ-привод имеет практически постоянный коэффициент мощности на всех скоростях. Блоки ШИМ также могут управлять несколькими двигателями на одном приводе [4].
Таким образом, несущая частота выводится из скорости включения и отключения силовых транзисторов в цепь. Это также называется частотой переключения. Чем выше частота переключений, тем выше разрешение широтно-импульсной модуляции. Типичный переключатель работает в диапазоне частот от 3 до 4 кГц или от 3000 до 4000 циклов в секунду. [5]. Таким образом ясно, что чем выше частота переключений, тем выше будет разрешение выходного сигнала. Также отмечено, что частота переключений уменьшает КПД привода, так как приводит к увеличению тепловыделения.
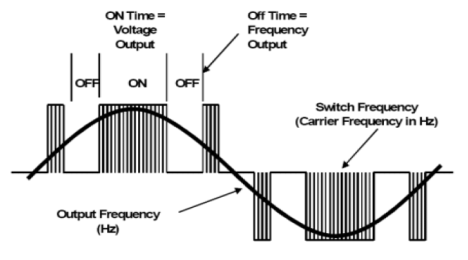
Рис. 3. Форма выходного импульса привода с широтно-импульсным модулятором
II. Математическое моделирование трехфазного источника напряжения
Трехфазный источник напряжения является поставщиком переменного трехфазного напряжения с постоянной частотой ωе, в который установлен LC фильтр трехфазного напряжения на статоре асинхронного двигателя. Модель использует формулы (2) — (4):
Vas = Vm cos ωеt(2)
Vbs = Vm cos(ωеt+θ)(3)
Vcs = Vm cos(ωеt-θ)(4)
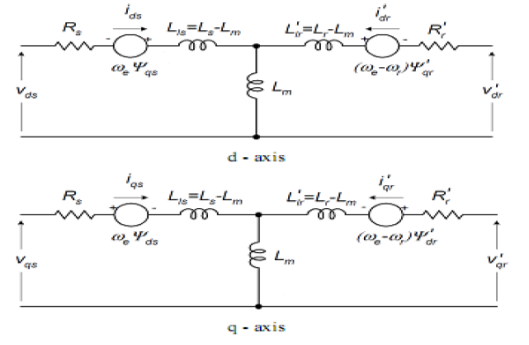
Рис. 4. Эквивалентная электрическая dqo-схема индукции двигателя
III. Модель асинхронного двигателя
Трехфазный асинхронный двигатель работает как преобразователь электрической энергии в механическую, который оказывает электромагнитный крутящий момент на нагрузку. Асинхронный двигатель моделируется с использованием преобразования фиксированных координат abc во вращающиеся координаты dqo. Эквивалентная принципиальная схема координации dqo показана на рис.4. Модель трехфазного асинхронного двигателя может быть сформулирована так, как указано в уравнениях ниже [3]. Из приведенной выше диаграммы следующие уравнения получены для потока;
𝜑𝑞𝑠 = 𝐿𝑠 𝑖𝑞𝑠 + 𝐿𝑚 𝑖’𝑞𝑟(5)
𝜑d𝑠 = 𝐿𝑠 𝑖d𝑠 + 𝐿𝑚 𝑖’d𝑟(6)
𝜑’𝑞r = 𝐿’r 𝑖’𝑞r + 𝐿𝑚 𝑖𝑞s(7)
𝜑’dr = 𝐿’r 𝑖dr + 𝐿𝑚 𝑖ds(8)
где 𝐿𝑠 = 𝐿𝑖𝑠 + 𝐿𝑚(9)
𝐿’𝑟 = 𝐿’𝑖𝑟 + 𝐿𝑚(10)
Для статора:
𝑉𝑞𝑠 = 𝑅𝑠 𝑖𝑞𝑠 + ![]() 𝜑𝑞𝑠 + 𝜔𝑒 𝜑𝑑𝑠(11)
𝜑𝑞𝑠 + 𝜔𝑒 𝜑𝑑𝑠(11)
𝑉𝑑𝑠 = 𝑅𝑠 𝑖d𝑠 + ![]() 𝜑d𝑠 + 𝜔𝑒 𝜑q𝑠(12)
𝜑d𝑠 + 𝜔𝑒 𝜑q𝑠(12)
Для ротора:
𝑉’𝑞𝑟 = 𝑅’𝑟𝑖’𝑞𝑟 +
𝑉’d𝑟 = 𝑅’𝑟𝑖’d𝑟 + ![]() 𝜑’dr + (𝜔𝑒 — 𝜔𝑟) 𝜑’q𝑟 (14)
𝜑’dr + (𝜔𝑒 — 𝜔𝑟) 𝜑’q𝑟 (14)
На это исследование 𝑉’𝑞𝑟 и 𝑉’𝑑𝑟 устанавливаются в ноль для машины с короткозамкнутым ротором.
Генерируемый электромагнитный момент задан как:
𝑇𝑒 = ![]() (
(![]() )𝐿𝑚 (𝑖𝑑𝑟 𝑖𝑞𝑠 — 𝑖𝑞𝑟 𝑖𝑑𝑠)(15)
)𝐿𝑚 (𝑖𝑑𝑟 𝑖𝑞𝑠 — 𝑖𝑞𝑟 𝑖𝑑𝑠)(15)
где
Lm — взаимная индуктивность
Lis — индуктивность рассеяния статора
L’ir — индуктивность рассеяния ротора
Iqs компонент оси Q тока статора
Ids компонент оси D тока статора
Iqr — компонент оси Q тока ротора
Idr компонент оси D тока ротора
φqs компонент оси Q потока статора
φds — компонент оси D потока статора
φqr — компонент оси Q потока ротора
φdr — компонент оси D потока ротора
Vqs компонент оси Q напряжения статора
Vds — компонент оси D напряжения статора
Vqr — компонент оси Q напряжения ротора
Vdr — компонент оси D напряжения ротора
ωe — скорость вращения применяемой двухфазной системы отсчета Q-D
ωr — скорость вращения ротора двигателя в электрических градусах
Rs — сопротивление статора
Rr — сопротивление ротора
Влияние изменения напряжения питания на пусковой момент
Если Тst = K1E22R2 / (R22 + X22)(16)
заменяем E2 напряжением V
тогда Tst = K1V2R2 / (R22 + X22) = K1V2R2 / Z22(17)
Подставляя, K3 = K1V2R2 / Z22,
тогда Tst = K3V2 (18)
График на рисунке 5 ниже представляет взаимосвязь между крутящим моментом и напряжением питания.
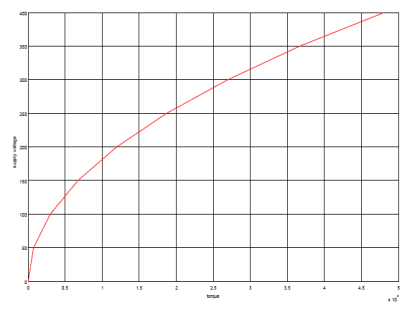
Рис. 5. График зависимости напряжения питания от крутящего момента
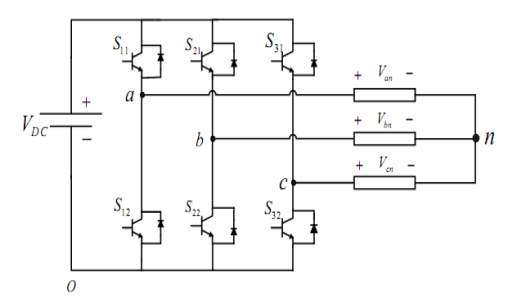
Рис. 6. Трехфазный полномостовой инвертор
IV. Модель инвертора
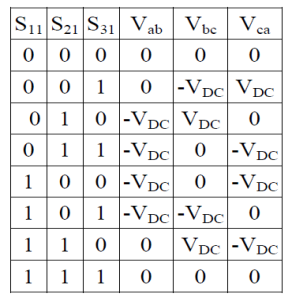
Модель инвертора, показанная на рисунке 6, имеет восемь состояний переключения, приведенных в таблице 1. Для того, чтобы схема исправно функционировала, оба переключателя в одной ветви не могут быть включены одновременно, так как это приведёт к короткому замыканию входного напряжения. Выражение для переключателей в одной ветви:
S11 + S12 (19)
S21 + S22 (20)
S31 + S32 (21)
Выбор состояний для генерации заданной формы волны выполняется методом модуляции, который обеспечивает использование только действительные состояния.
(𝑉𝐷𝐶/2) * (𝑆11 − 𝑆12) = 𝑉𝑎𝑛 + 𝑉𝑛𝑜 (22)
(𝑉𝐷𝐶/2) * (𝑆21 − 𝑆22) = 𝑉𝑏𝑛 + 𝑉𝑛𝑜 (23)
(𝑉𝐷𝐶/2) * (𝑆31 − 𝑆32) = 𝑉𝑐𝑛 + 𝑉𝑛𝑜 (24)
Выражение (22) — (24) в терминах сигналов модуляции и использование условий от (17) до (19) дает:
(𝑉𝐷𝐶/2) * 𝑀11 = 𝑉𝑎𝑛 + 𝑉𝑛𝑜 (25)
(𝑉𝐷𝐶/2) * 𝑀21 = 𝑉𝑏𝑛 + 𝑉𝑛𝑜 (26)
(𝑉𝐷𝐶/2) * 𝑀31 = 𝑉𝑐𝑛 + 𝑉𝑛𝑜 (27)
Добавление уравнений (25) по (27) даёт уравнения (28);
(𝑉𝐷𝐶/2) * (S11 + S21 + S31 − S12 − S22 − S32) = 𝑉𝑎𝑛 + 𝑉𝑏𝑛 + 𝑉𝑐𝑛 + 𝑉𝑛𝑜 (28)
Поскольку мы имеем дело с уравновешенными напряжениями,
𝑉𝑎𝑛 + 𝑉𝑏𝑛 + 𝑉𝑐𝑛 = 0, уравнение (28) принимает вид:
(𝑉𝐷𝐶/6) * (2S11 + 2S21 + 2S31 −3) = V𝑛𝑜 (29)
Подстановка переменной 𝑉𝑛𝑜 в уравнениях (22) — (24) дает:
S3 2S11 −S21 −S31 = Van (30)
S3 2S21 −S21 −S31 = Vbn (31)
VDC3 2S31 −S21-S11 = Vcn (32)
Таблица 1
Состояния переключения трехфазного инвертора
V. Модель управления скоростью асинхронного двигателя сиспользованием инвертора
Моделирование выполняется с помощью инвертора с использованием метода широтно-импульсной модуляции. Частота и амплитуда выходного напряжения изменяются с использованием техники ШИМ, и эти контролируемые напряжение и частота используются для управления скоростью двигателя. Модель Simulink, показанная на рисунке 7 ниже, имеет следующие параметры, приведенные в таблице 2.
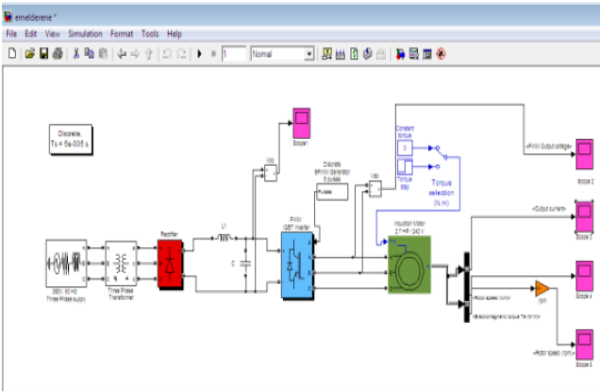
Рис. 7. SIMULINK-модель управления скоростью асинхронного двигателя с использованием ЧРП
Таблица 2
Параметры модели асинхронного двигателя
|
Параметр |
Значение |
|
Номинальное напряжение |
380 В |
|
Номинальная частота |
50 Гц |
|
Тип ротора |
Короткозамкнутый (беличья клетка) |
|
Мощность |
2 кВт |
|
Количество полюсов |
4 |
|
Номинальная скорость |
1500 об/мин |
VI. Результаты моделирования
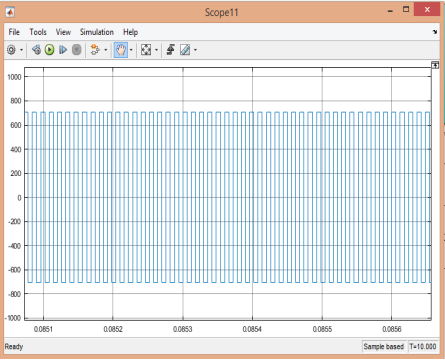
Рис.8. Форма выходного напряжения ШИМ
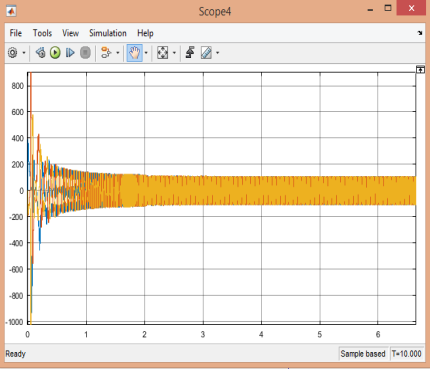
Рис. 9. Форма выходного тока
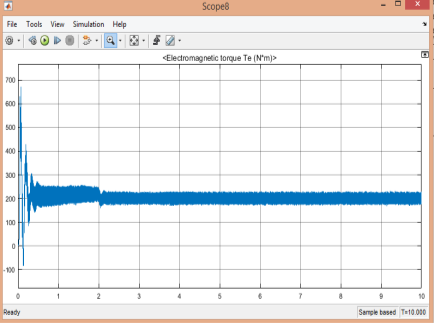
Рис. 10. Электромагнитный крутящий момент
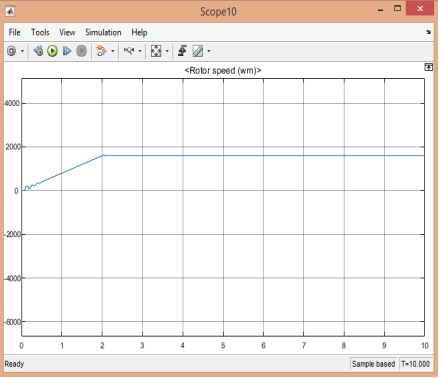
Рис. 11. Скорость ротора (об / мин)
На рисунке 8 показаны трехфазные модулирующие ШИМ-сигналы для инвертора. Увеличение частоты модулирующих сигналов хорошо видно. На рисунке 9 показан ток статора. Параметры изначально имеют линейный характер, пока не установятся на пиковом значении при 50 Гц. Рисунок 11, показывает скорость ротора. Видно, что ЧРП удалось увеличить частоту вращения двигателя используя номинальную частоту 50 Гц. Первоначально скорость двигателя увеличивается от нуля и превышает номинальную скорость; он испытывает некоторые переходные процессы и затем стабилизируется до стабильного уровня в течение нескольких миллисекунд. Наконец на рисунке 10 показан электромагнитный момент модели. ЧРП обеспечивает следующие преимущества:
− Энергосбережение;
− Низкий пусковой ток двигателя;
− Снижение тепловых и механических нагрузок на двигатели и ремни во время пусков;
− Высокий коэффициент мощности.
VII. Заключение
Изменение электрической частоты напряжения питания с помощью ЧРП изменит скорость вращения двигателя, но это также потребует регулировки напряжения на клеммах, чтобы поддерживать величину уровня потока в сердечнике двигателя, в противном случае двигатель будет испытывать насыщение сердечника и чрезмерный ток намагничивания. Таким образом, после изучения частотно-регулируемого привода становится возможным контролировать скорость электродвигателя, а также экономить электроэнергию, поскольку известно, что энергосбережение стало важной темой во всем мире.
Литература:
- Нед Мохан, Торе М. Ундалэнд и Уильям П. Роббинс Силовая электроника (преобразователи, применение и дизайн), третье издание, John Wiley and sons INC.
- Розанов, Ю. К. Силовая электроника: учебник и практикум для СПО / Ю. К. Розанов, М. Г. Лепанов; под ред. Ю. К. Розанова. — М.: Издательство Юрайт, 2018. — 206 с.
- Вольдек А. И., Попов В. В. Электрические машины. Машины переменного тока: Учебник для вузов. — СПб.: Питер, 2010. — 350 с.: ил.
- Кулик В. Д. Силовая электроника. Автономные инверторы, активные преобразователи; — СПб.: СПбГТУРП, 2010. — 90 с.
- Рушкин Е. И., Семёнов А. С. Анализ энергоэффективности системы электропривода центробежного насоса при помощи моделирования в программе MatLab // Современные наукоемкие технологии. — М., 2013. — № 8 — С. 341–342.
