




Современное производство сложно представить без станков с числовым программным управлением (ЧПУ). Они обеспечивают высокую эффективность и универсальность одного рабочего места, экономию сырья и уменьшение вспомогательного времени, потраченного на изготовление детали. На одном станке ЧПУ можно осуществлять различные работы по формированию поверхностей детали.
Современные системы ЧПУ обладают колоссальной технологической гибкостью и универсальностью. Возможность быстрой переналадки оправдывает повышение стоимости оборудования. Кроме того, изготовление некоторых сложных профилированных деталей без использования систем ЧПУ оказывается невозможным.
В зависимости от элементной базы и уровня использования ЭВМ различают системы нескольких поколений.
Системы ЧПУ первого поколения были построены на дискретных полупроводниковых элементах. Ввод программы в этих системах осуществлялся на магнитной ленте в унитарном коде или в фазовом виде.
Системы ЧПУ второго поколения имели элементную базу малой и средней степени интеграции, с помощью которых осуществлялась схемная реализация алгоритмов управления. В устройствах ЧПУ второго поколения ввод программы осуществлялся на с помощью перфоленты.
Системы ЧПУ третьего поколения имели расширенные технологические возможности, осуществлялась программная реализация алгоритмов управления [1]. Добавилась возможность ввода программы с клавиатуры, таким образом, с помощью типовых циклов можно задать программу для обработки несложных деталей непосредственно на станке. В систему встраивались дисплей с отображением обрабатываемой детали.
В системах ЧПУ четвертого поколения элементная база состоит из специальных больших интегральных микросхем (БИС). Составление управляющей осуществляется на языках высокого уровня. Есть возможность ввода управляющей программы с помощью электронных носителей.
В системах ЧПУ пятого поколения интегрируются промышленные персональные компьютеры. Обновлены системы ввода, хранения и обмена информации, добавлена возможность структурного изменения, возможность выполнения функций самонастройки и адаптации, загрузка управляющих программ с удаленного терминала (сетевое управление), который может контролировать работу нескольких систем ЧПУ на большом участке производства. Таким образом, можно объединять отдельные станки в группы в рамках технологической цепочки производства изделий. Также предъявляются требования расширенной диагностики оборудования.
Практически все современные ЧПУ поддерживают интерполяцию с малой дискретностью вычислений («наноинтерполяцию») и алгоритмы «предпросмотра», т. е. возможность просчитывать траекторию инструмента и заранее снижать скорость перед её резкими изменениями (что особенно актуально для обработки на больших скоростях) [2].
Большое внимание уделяется функциям моделирования процесса обработки, когда система не просто визуализирует на экране маршрут движения инструмента, а представляет модель фактического результата обработки [2].
Управление исполнительными устройствами станка с ЧПУ заключается в выдаче контроллером движения (КД) управляющего воздействия, а также обеспечении обратной связи для контроля формообразующего движения режущего инструмента относительно заготовки в соответствии с заданной программой обработки.
Управляющая программа состоит из набора кадров (команд), определяющих траекторию движения инструмента (заготовки), а также скорости вращения шпинделей, смену инструментов и другие вспомогательные операции.
На рисунке 1 изображена блок-схема работы управляющей программы, контролирующей движение по одной координате. Команда, содержащая конечное значение координат X и скорость подачи V на участке траектории, после подготовки и интерпретации поступает на интерполятор, где происходит развертка координат во времени и формирование текущих величин задания положения и скорости по заданной координате.
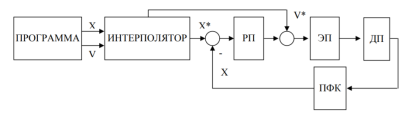
Рис. 1. Блок-схема работы части управляющей программы
Перемещение механизма контролируется датчиками положения (ДП). Оцифровка информации с ДП и организация обратной связи осуществляется с помощью преобразователя фаза-код (ПФК). Сигнал рассогласования по положению формируется регулятором положения (РП) и затем подается на отработку в электропривод. С выхода интерполятора на вход регулятора скорости ЭП также подается сигнал задания скорости V*, при этом сам ЭП охвачен обратной связью по скорости. Это необходимо для улучшения динамических свойств привода [3].
Для выполнения своих задач КД должен включать в себя следующие компоненты:
– микропроцессор — для преобразования кодов программы в управляющие импульсы;
– набор датчиков для обеспечения обратной связи, а также контроля состояния всех систем станка и протекающих процессов;
– оперативную память — для работы с текущей информацией, необходимой в процессе работы;
– постоянную память — для хранения управляющих программ, настроек оборудования и прочей вспомогательной информации;
– устройство обеспечивающий интерфейс для передачи данных;
– устройство управления (встроенное или удалённое).
При создании современных КД, производители стремятся включить в свой продукт целый комплекс устройств:
– вычислительное устройство;
– силовые модули для двигателей различного типа;
– развитый набор периферийных устройств;
– средства интерфейса с ведущим компьютером (хостом) и силовыми модулями;
– среду разработки системы управления движением.
Такие аппаратно-программные комплексы должны решать задачи широкого класса по управлению движением и контролю процессов производства [4].
Обычно, набор функций, поставляемый с КД, включает в себя:
– управление положением «точка — точка»;
– толчковый режим «jog»;
– режим «PVT» (положение — скорость — время);
– слежение за положением;
– позиционирование;
– линейную, круговую и сплайновую интерполяции;
– поддержка алгоритмов прямой и инверсной кинематики.
Все КД обеспечивают помимо функций управления движением, функции логического управления, а также могут задавать профили скоростей и ускорений. В контроллерах предусматривается возможность управления различными типами двигателями. Для организации обратных связей по положению могут быть использованы квадратурные и синусоидальные энкодеры, резольверы, датчики Холла. В качестве регуляторов положения, как правило, применяются ПИД-регуляторы с упреждающими связями по скорости и положению, настраиваемые пользователем, полиномиальные, так же регуляторы, создаваемых пользователем. Для управления электроавтоматикой КД имеют набор дискретных входов и выходов [5].
Система управления движением (СУД) может включать в себя совместно с КД удаленный терминал, либо обходится без него. Также СУД должна обладать высоким быстродействием, иметь набор необходимых функций для решения задач в режиме реального времени. Задачи управления распределены между отдельными подсистемами, как на аппаратном, так и на программном уровне.
Основной элементной базой при разработке современных систем управления являются: программируемые логические интегральные схемы (ПЛИС), микроконтроллеры, а также специализированные интегральные схемы (ASIC).
Ранние ПЛИС обладали небольшими быстродействием и малым количеством эквивалентных логических вентилей, однако сейчас ситуация кардинально изменилась. Появление быстродействующих ПЛИС высокой и сверхвысокой интеграции, работающих на высоких тактовых частотах, а также появление новых технологий разработки устройств на базе ПЛИС привело к тому, что для многих задач они стали реальной альтернативой специализированным интегральным схемам (ASIC). Проектирование устройств на базе ПЛИС обладает еще одним преимуществом, перед ASIC схемами — на этапе отладки и реализации готового устройства есть возможность оперативного исправления ошибок. Кроме того, процесс подготовки к производству нового ASIC-чипа намного дороже и длительнее, чем разработка новой ПЛИС. Достоинства и недостатки двух технологий отображены в таблице 1.
Таблица 1
Достоинства инедостатки ПЛИС иASIC технологий
|
ПЛИС |
ASIC |
|
Быстрая аппаратная часть |
Медленная аппаратная часть |
|
Меньшее количество логических элементов |
Большее количество логических элементов |
|
Большая мощность |
Меньшая мощность |
|
Более высокая себестоимость (не меняется в зависимости от размера партии) |
Более низкая себестоимость (при заказе крупных парий) |
|
Драйвер процессов ИС |
Нет возможности контроля протекающих процессов |
|
Не требует наличия топологии и физической реализации |
Наличие топологии и физической реализации |
|
Возможность внесения изменений в готовое устройство (в течение нескольких минут) |
Внесение изменений в готовое устройство не возможно |
Гибкость ПЛИС позволяет построить на одном кристалле быстродействующие системы управления, которые могут учитывать множество входящих параметров. К таким относится системы, работающие в недетерминированных условиях, например, автономные мобильные шагающие роботы, в которых для реализации задач перемещения нужно решать задачи устойчивости платформы при ходьбе, контроля опорной поверхности в области предполагаемого размещения стопы каждой конечности, координации движения всеми конечностями для составления походки с учётом состояния опорной поверхности [6].
Учитывая приведенные преимущества, для аппаратной реализации функций в КД, критичных ко времени исполнению, таких как формирование ШИМ сигналов для управления исполнительными механизмами, обеспечивающих движение по сложной траектории, обработка информации от систем определения положения и скорости, системы управления ЧПУ чаще строятся на базе ПЛИС.
Программируемые логические интегральные схемы включают в себя две основные группы: CPLD (Complex Programmable Logic Device) — Сложные Программируемые Логические Устройства и FPGA (Field-Programmable Gate Array) — Программируемая Пользователем Вентильная Матрица.
Чипы обеих групп структурно состоят из:
– матрицы логических блоков;
– матрицы соединений;
– блоков ввода-вывода;
– конфигурационной памяти.
Их различие состоит в структуре базового слоя. У CPLD он состоит из элементарных вентилей, а FPGA состоит из компактных логических ячеек на основе таблиц истинности (LUT) благодаря чему FPGA имеет более гибкую архитектуру.
Конфигурационная память хранит топологию связей между логическими блоками. По организации хранения конфигурации все ПЛИС можно разделить на несколько видов.
Однократно программируемые устройства, которые могут быть запрограммированы только однажды и повторное программирование невозможно, такие устройства начинают работать с момента подключения к ним питания.
ПЛИС с возможностью хранения программ в статической оперативной памяти (SRAM), а инициализация устройства осуществляется из внешнего источника. Переконфигурирования таких устройств заключается в загрузки нового файла конфигурации в SRAM.
ПЛИС с использованием перепрограммируемой энергонезависимой памяти (флэш-памяти). В этих устройствах ПЛИС не требуется загрузки конфигурации при каждом включении устройства.
В настоящее время доступны ПЛИС с комбинацией флэш-памяти и SRAM. Например, семейство LatticeXP [7] предлагает новую технологию Transparent Field Reconfiguration (TransFR или TFR). Эта технология обеспечивает реконфигурирование ПЛИС LatticeXP без прекращения работы устройства, в котором она установлена. Линии управления поддерживают загрузку конфигурации во флэш-память в фоновом режиме, затем в нужный момент времени фиксируются выходы, приостанавливается работа ПЛИС, обновляется содержимое SRAM из флэш-памяти, и управление возвращается к обновленной пользователем логике [8]. На рисунке 2 изображены некоторые элементы, из которых состоит LatticeXP.
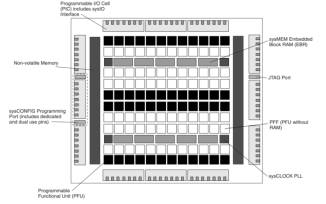
Рис. 2. Блок-схема ПЛИС семейства LatticeXP
Конечно, каждый изготовитель имеет собственное представление о компромиссе между сложностью ячеек, гибкостью подключения и возможностями ввода-вывода.
Учитывая необходимость для систем с ЧПУ решать задачи в реальном времени с высоким быстродействием выбор аппаратной реализации функций очевиден. Разработка и внедрение специализированных интегральных схем занимает много времени из-за необходимости наладить производство новых чипов и не выгодна в мелкосерийном производстве, а в случае с единичным производством такой вариант вообще не приемлем с экономической точки зрения. В то же время современные ПЛИС обладают такой логической емкостью, что позволяют проектировать целые системы на одном кристалле, к тому же могут быть переконфигурированы при необходимости в любой момент. Из-за чего система с ЧПУ может быть модернизирована в короткий срок. Совершенствование средств разработки и программирования, а также возможность отладки средствами самой ПЛИС, значительно сокращает время на разработку нового или модернизацию существующего устройств. Таким образом, выбор программируемых логических интегральных схем для построения систем с ЧПУ оправдан и очевиден.
Литература:
- Таратынов О. В. Металлорежущие системы машиностроительных производств: Учебное пособие для вузов. 2-е изд. — М.:МГИУ,2006. — 488 с.
- Сидоров И. С. Структурно — параметрический синтез цифрового позиционно — следящего электропривода с переменной частотой квантования регулятора положения: дис.... канд. тех. наук. Самарский. гос. университет, Самара, 2017.
- Иванов В. М. Электроприводы с системами числового программного управления: учебное пособие — Ульяновск: УлГТУ, 2006. — 152 с.
- Бурков А. П., Красильникъянц Е. В. Принципы построения контроллеров движения: Тез. докл. Междунар. науч.-техн. конф. по автоматизированному электроприводу «АЭП 2007». — СПб., 2007.
- Красильникъянц Е. В., Бурков, А. П., Иванков В. А., Булдукян Г. А., Ельниковский Е. В., Варков А. А. Системы управления движением технологических объектов//Вестник ИГЭУ Вып. 4. 2007. С. 42–46.
- Фокин В. Г., Шаныгин С. В. Структура системы управления шестиногого шагающего робота Гексабот // Интернет-журнал «НАУКОВЕДЕНИЕ» Том 8, № 5 (2016) Режим доступа: http://naukovedenie.ru/PDF/10TVN516.pdf (дата обращения 10.11.2017).
- LatticeXP2 // Lattice Semiconductor. URL: http://www.latticesemi.com/en/Products/FPGAandCPLD/LatticeXP2.aspx (дата обращения: 10.11.2017).
- LatticeXP Family Data Sheet // Lattice Semiconductor. URL: http://www.latticesemi.com/~/media/LatticeSemi/Documents/DataSheets/LatticeXP2/LatticeXPFamilyDataSheet.PDF (дата обращения: 10.11.2017).
