Насосное оборудование в энергетических установках с ядерными реакторами выполняет критическую функцию обеспечения теплопередачи и тепло- и массопереноса, необходимых для преобразования внутриядерной энергии в электрическую [1]. Циркулирующие потоки теплоносителя движутся по сложным замкнутым контурам с высокой скоростью, что достигается за счет работы мощных насосных агрегатов. Энергетические характеристики насосного оборудования АЭС свидетельствуют о его значительной роли в общем энергобалансе [2]:
– Приводы насосов потребляют до 90 % мощности собственных нужд энергоблока;
– Суммарная установленная мощность электродвигателей насосов составляет ~10 % от номинальной мощности блока;
– Расход электроэнергии на работу насосного оборудования достигает ~7 % от общей выработки энергоблока.
Во время эксплуатации насосных агрегатов (НА) возможно возникновение неисправностей — состояний, при которых нарушается хотя бы одно из эксплуатационных требований. Несвоевременное выявление и устранение неисправностей может привести к их переходу в отказы, сопровождающиеся поломкой оборудования или аварийными ситуациями [3]. Одним из критических диагностических параметров является температура подшипниковых узлов как насоса, так и его электродвигателя. Перегрев подшипников может быть вызван:
– Нарушением режима смазки;
– Износом подшипниковых элементов;
– Несоосностью валов;
– Повышенными вибрационными нагрузками;
– Попаданием абразивных частиц.
Работа существующих алгоритмов, выполняющих защиту оборудования от превышения температуры, заключается в её постоянном контроле и сравнении с уставкой, при превышении которой оборудование отключается. Но у данного метода имеется существенный недостаток, связанный с механической и тепловой инерционностью насосных агрегатов, а также средств измерений. Что, в случае быстрого роста температуры, может превести к повреждению технологического оборудования при своевременном срабатывании защиты из-за тепловой инерционности.
Для повышения эффективности защиты предложен алгоритм динамической коррекции уставок, который можно интегрировать в существующую АСУ ТП. Его новизна заключается в использовании скорости роста температуры и применении искусственной нейронной сети. Алгоритм динамической коррекции уставок представлен на рисунке 1.
Разработанный алгоритм динамической коррекции уставок (рис. 1) представляет собой циклическую программу, интегрируемую в АСУ ТП энергоблока. Алгоритм работает в реальном времени и обеспечивает непрерывный мониторинг температурного состояния подшипниковых узлов.
У алгоритма есть несколько режимов работы, которые определяются по состоянии накладки, управляемой оператором:
– «ОТКЛ» — состояние при котором отсутствует потребность в работе алгоритма динамической корректировки уставок ТЗиБ, используется, когда оператор самостоятельно отслеживает параметры НА и требуется исключить всякую вероятность ложного включения ТЗиБ.
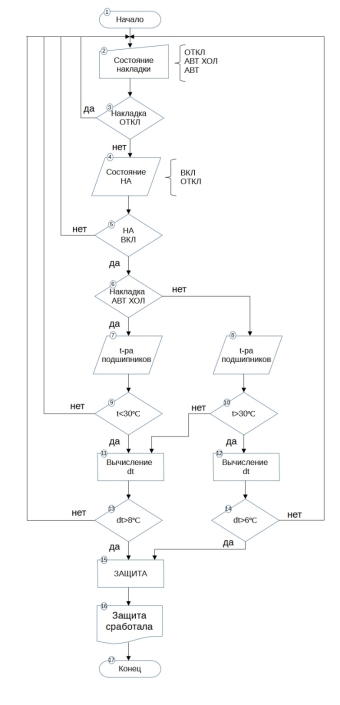
Рис. 1. Алгоритм динамической коррекции уставок
– «АВТ ХОЛ» — автоматическая работа алгоритма при старте оборудования из холодного состояния, применяется после окончания ремонта НА при тестировании на холостом ходу. Также в случае когда фактическая температура подшипников ниже 30 ºС. Данный режим характеризуется интенсивным ростом температуры до выхода на рабочие параметры, в связи с чем величина защитной уставки выше, чем для «Дежурного» режима;
– «АВТ» — автоматизированная работа алгоритма, объединяющий режимы «Холодный пуск» и «Дежурный». Дежурный режим служит для защиты оборудования, подшипниковые узлы которого достигли рабочей температуры, что предотвращает её резкое увеличение, в связи с чем значение защитной уставки меньше чем для режима «Холодный пуск».
Программа контролирует статус накладки (блок 3), если накладка «Выведена», то программа циклически проверяет статус накладки (возвращается к блоку 2), когда оператор установит для накладки режим «Введена», программа фиксирует (блок 4) статус насосного оборудования.
В автоматизированной системе определены два ключевых (взаимоисключающих) статуса насосов:
– «ВКЛ» — насосное оборудование работает;
– «ОТКЛ» — насосное оборудование остановлено.
Алгоритм отслеживает текущий статус насосного агрегата (блок 4). Когда насосный агрегат выключен, в динамической настройке параметров нет необходимости, активируется цикл (секция программы блок 2 — блок 5), однако если насосный агрегат работает происходит переход к блоку 6, где проверяется какой режим установлен для накладки — «АВТ ХОЛ» или «АВТ».
При помощи блоков ввода данных 7,8 алгоритм принимает актуальную температуру подшипников НА. При условии, что ситуация складывается таким образом, что активна опция «АВТ ХОЛ» (блок 6) и температура подшипников меньше 30 ºC (t<30ºC) (блок 9), то активируется процесс расчета dt (блок 11).
dt — показатель, учитывающий температурную разность между текущим и предыдущим шагом (см. рисунок 2), данная величина характеризует скорость изменения температуры подшипников насосного агрегата.
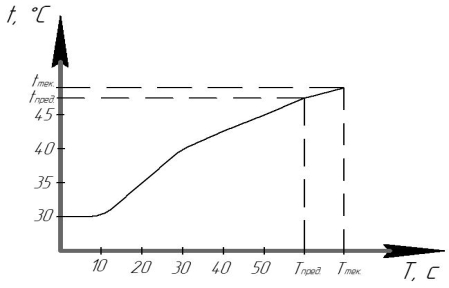
Рис. 2. Графическое представление dt
Когда значение dt>8 ºC, происходит прохождение защитного сигнала, насосный агрегат отключается, что приводит к завершению функционирования алгоритма (блоки 13, 15, 16, 17), в то время как при осуществлении проверки dt<8 ºC (блок 13) происходит вход алгоритма в цикл (отрезок блок 2 — блок13).
В ситуации, когда складываются условия таким способом, что накладка пребывает в состоянии «АВТ ХОЛ» (блок 6) и показатель температуры подшипников превышает 30 ºC (t>30ºC) (блок 9), то происходит вход алгоритма в цикл (отрезок блок 2 — блок 9). Автоматический переход к работе в режиме «Дежурный» не будет осуществлен, для этого требуется установить накладку в положение «АВТ».
При формировании условий таким способом, что установлена накладка «АВТ ХОЛ» (блок 6), а температура подшипников превышает 30 ºC (t>30ºC) (блок 10), начинается процедура расчёта dt (блок 12). В ситуации, если dt>6 ºC проходит защитный сигнал, насосная установка выключается, и таким образом завершается выполнение алгоритма (блоки 14, 15, 16, 17), а когда при контроле dt<6 ºC (блок 14) алгоритм входит в цикл (участок блок 2 — блок14).
Таким образом, разработанный алгоритм динамической коррекции уставок технологических защит насосного оборудования АЭС, обеспечивает повышенную эффективность защиты от перегрева подшипниковых узлов.
Новизна предложенного решения заключается в использовании скорости роста температуры (dt) в качестве основного диагностического параметра и применении адаптивных пороговых значений в зависимости от режима работы оборудования.
Алгоритм реализует три режима работы с дифференцированными критериями срабатывания: dt>8°C для режима холодного пуска и dt>6°C для дежурного режима, что обеспечивает баланс между надежностью защиты и предотвращением ложных срабатываний.
Предложенная система легко интегрируется в существующие АСУТП и не требует значительных капитальных затрат на модернизацию оборудования.
Алгоритм обладает универсальностью и может применяться не только в атомной энергетике, но и в других отраслях промышленности, эксплуатирующих критическое насосное оборудование.
Литература:
1. Правила ядерной безопасности реакторных установок атомных станций (ПБЯ РУ АС-89). М.: Энергоатомиздат, 1990.
2. Технические условия на эксплуатацию насосного оборудования атомных электростанций. РД ЭО 0185–01. М.: ВНИИАЭС, 2001.
3. ГОСТ 27.002–2015. Надежность в технике. Термины и определения.

