В статье описан способ составления и обучения искусственной нейронной сети для модели указателя положения регулирующего клапана регулятора уровня парогенератора. А также, приведены структура нейронной сети и примеры обучающих выборок.
Ключевые слова: математическая модель указателя положения, целевой и выходной вектор искусственной нейронной сети.
Для полноценной работы регулирующих клапанов (РК) в автоматическом режиме, необходим сигнал обратной связи о положении регулирующего органа [1], который АСУ ТП получает в виде аналогового сигнала от указателя положения (УП), встроенного в исполнительный механизм электроприводной арматуры. В случае неисправности УП, АСУ ТП переходит от использования сигнала УП на математическую модель (ММ) УП [2]. Как показано в [3] существующая ММ УП, реализованная на базе ТПТС имеет существенные недостатки, выражающиеся в большом рассогласовании между реальным сигналом с УП и расчетным по ММ.
Разрабатываемая ММУП РК с использование искусственной нейронной сети (ИНС) функционирует в режиме обучения и в режиме работы. Режим обучения ММУП будет происходить все время, пока УП имеет достоверное значение [3]. При этом весовые коэффициенты ИНС будут иметь самые актуальные значения.
Для обучения ММУП с использованием ИНС необходимо использовать следующие сигналы и параметры:
- сигналы которые влияют на перемещение РК: команда «открыть» и команда «закрыть»;
- сигналы обратной связи от РК: концевой выключатель открытия (КВО), концевой выключатель закрытия (КВЗ), указатель положения (УП);
- значения технологических параметров.
Обучающие сигналы ИНС ММУП влияющие на перемещение РК и обратной связи от РК применяются для любого РК, в то время как технологические параметры зависят от конкретной системы, где используется регулятор.
Далее рассмотрим построение ММУП с использованием ИНС на примере основного регулятора уровня первого парогенератора (ОРУ ПГ-1). Для обучения ИНС ММУП РК ОРУ ПГ-1 возможно использовать сигналы приведенные в таблице 1.
Таблица 1
Перечень технологических параметров и сигналов обратной связи для обучения ИНС
|
Обозначение сигнала (KKS) |
Описание сигнала |
|
20JEA10CL902_XQ01 |
Уровень в ПГ-1 |
|
20LAB30CF901_XQ01 |
Расход питательной воды на ПГ-1 |
|
20LAB30CT002_XQ51 |
Температура питательной воды на входе в ПГ-1 |
|
20LAB10CP903_XQ01 |
Давление перед узлом питания ПГ |
|
20LAB30FF001_XQ02 |
Вычисленный расход пара ПГ-1 |
|
20LAB31AA201_XQ08 |
УП пускового РУ ПГ-1 |
|
20LAB30AA201VL0_Z0#2 |
Команда «Открыть» ОРУ ПГ-1 |
|
Сигнала в базе нет |
Время отсутствия команды «Открыть» |
|
20LAB30AA201VL0_Z0#0 |
Команда «Закрыть» ОРУ ПГ-1 |
|
Сигнала в базе нет |
Время отсутствия команды «Закрыть» |
|
20LAB30AA201_XC01 |
ОРУ ПГ-1 «Открыто» |
|
20LAB30AA201_XC02 |
ОРУ ПГ-1 «Закрыто» |
|
20LAB30AA201_XQ08 |
УП ОРУ ПГ-1 |
Выбор технологических параметров, приведенных в таблице 1 обусловлен теоретически возможным их влиянием на регулирующий орган ОРУ ПГ, в части возможного изменения затирания, теплового расширения или вибрации.
Положение пускового РУ ПГ-1 также необходимо учитывать, поскольку оно также влияет на технологические параметры.
На рис. 1. и рис.2. приведены примеры зависимости сигнала УП от изменения значений технологических параметров и сигналов обратной связи от РК ОРУ ПГ-1 (обучающие выборки).
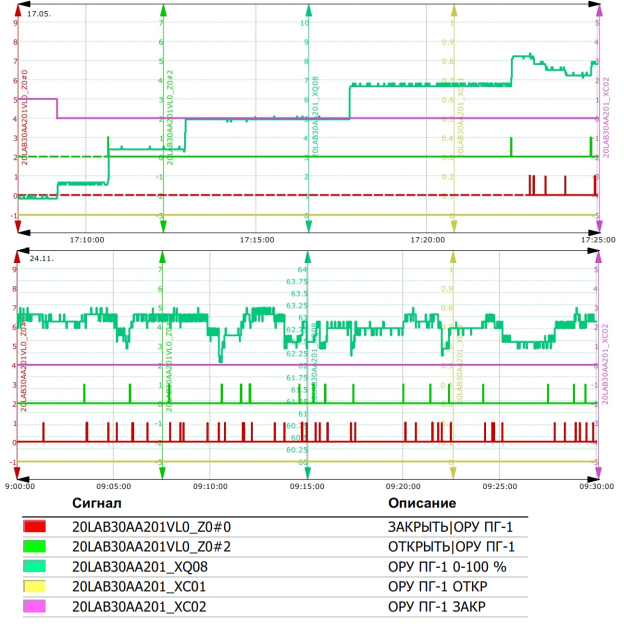
Рис. 1. Сигналов обратной связи от РК ОРУ ПГ-1
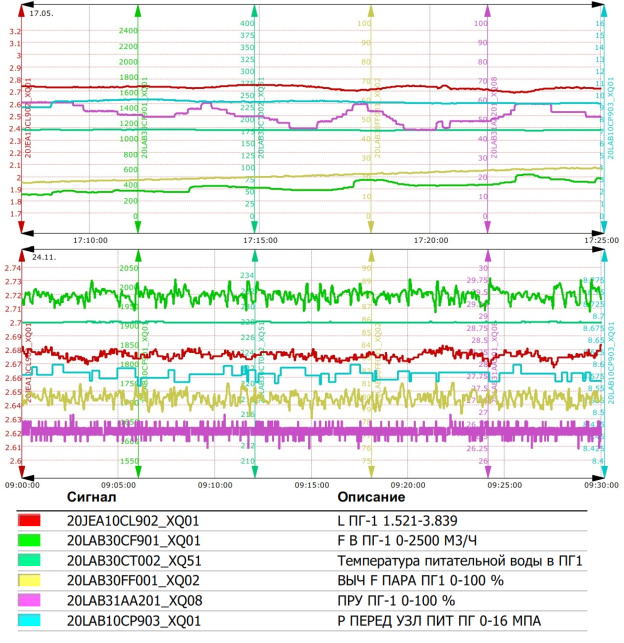
Рис. 2. Значений технологических параметров
Разрабатываемая ИНС (рис. 3) имеет однослойную структуру, а обучение будет происходить с «учителем» [4]. В качестве «учителя» будет использован сигнал с УП ОРУ ПГ-1 (20LAB30AA201_XQ08), так называемый целевой вектор, представляющий собой требуемый выход. Получившиеся значение ММУП (выходной вектор ИНС) сравнивается с целевым вектором и определяется ошибка. Ошибка подается с помощью обратных связей через алгоритм коррекции на вход ИНС. Таким образом происходит коррекция весовых коэффициентов и ошибка снижается. Это происходит до тех пор, пока ошибка не достигнет приемлемого значения.
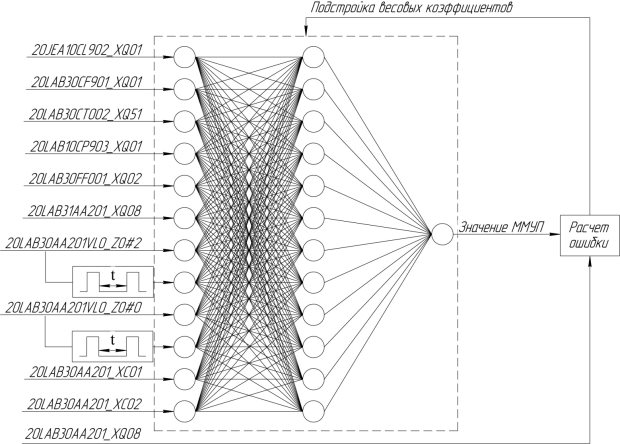
Рис. 3. Структура искусственной нейронной сети
Преимущества применения ИНС состоит в том, что можно учитывать не измеряемые характеристики РК:
- состояние механических узлов (люфты, затирания, выработки);
- не линейной характеристики асинхронного двигателя;
- перемещение штока в зависимости от люфтов, вибрации и последовательности управляющих команд на закрытие или открытие (времени прошедшего с момента их прохождения).
Всё вышеперечисленное должно положительно сказаться на точности работы модели УП, и как следствие, на стабильной работе ОРУ ПГ.
Литература:
- Техническое описание алгоритмов САР, реализованных в СКУ МЗ, МПУ ТО, МПУ БОУ энергоблока. АО «АТОМТЕХЭНЕРГО» Московский филиал «Центратомтехэнерго» Москва 2019.
- Каталог типовых решений по реализации алгоритмов измерения, управления, ТЗБиС, диагностики в ПТК ТПТС АСУ ТП энергоблоков № 3, 4 Ростовской АЭС (включая спецсистемы). Ростовская АЭС Энергоблоки № 3, 4 АСУ ТП. «Центратомтехэнерго» Московский филиал ОАО «Атомтехэнерго» Москва 2011.
- Ребриков, Д. И. Особенности работы модели указателя положения регулятора, реализованной на ТПТС при наличии люфтов и внешних возмущений / Д. И. Ребриков, И. В. Макаров. — Текст: непосредственный // Тезисы докладов Международной научно-технической конференции «Безопасность, эффективность и экономика атомной энергетики» (МНТК2024). — Москва: авторская редакция, 2024. — С. 38.
- Осовский С., Нейронные сети для обработки информации [Текст] / Пер. с польского И. Д. Рудинского. — М.: Финансы и статистика, 2004. — 344с.

