В статье представлены особенности работы математической модели указателя положения, реализованного на базе ПТК ТПТС и описаны её недостатки. Представлена идея устранения этих недостатков с использованием искусственной нейронной сети.
Ключевые слова: математическая модель указателя положения регулирующего клапана, алгоритмы регулирования, режим обучения и режим работы искусственной нейронной сети.
В схемах регулирования турбинного отделения НВАЭС-2 используется сигнал обратной связи с указателей положения, который необходим для:
- Корректного функционирования алгоритмов регулирования (например, в регуляторе уровня парогенератора, где для совместной работы основного и пускового регулирующий клапанов используется сигналы с указателей положения) [1];
- Визуального отображения положения регулирующего клапана (РК).
Указатели положения, входящие в состав РК не имеют резерва. Поэтому, для корректной работы алгоритмов регулирования, в случае отказа указателя положения (УП), в ТПТС реализована математическая модель указателя положения (МУП), сигнал с которой будет использоваться в алгоритмах регулирования после того как сигнал с указателя положения станет недостоверным. Алгоритм работы математической модели указателя положения приведен на рис. 1.
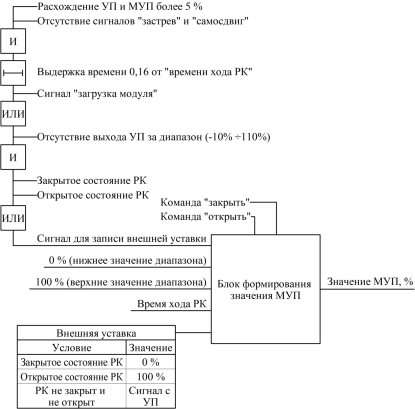
Рис. 1. Алгоритм работы математической модели указателя положения
Математическая МУП работает следующим образом [1, 2]:
- Величина, на которую открывается/закрывается РК определяется по формуле: длительность команды открыть/закрыть умноженное на 100 % и деленное на время хода РК;
- При наличии концевого выключателя «закрыто» в МУП присваивается значение "0 %";
- При наличии концевого выключателя «открыто» в МУП присваивается значение "100 %";
- Реальное значение УП записывается в МУП при загрузке (включении) модуля ТПТС, а также через 0,16 от «времени хода РК» при расхождении значений МУП и УП более 5 % и отсутствие сигнала «самосдвиг» и «застрев».
Существующая математическая МУП имеет следующие недостатки:
- Время хода РК записывается в модель в виде константы (значение которое определено в ходе испытаний), а реальное время хода РК зависит от:
– технологических параметров (расхода, давления, температуры, количества включенных насосных агрегатов и т. п.);
– состояния узлов РК (наличие люфтов, затирания, выработок);
– вибрации и температурных расширений трубопровода на котором расположен РК;
– не линейной характеристики асинхронного двигателя, который применяется в качестве электропривода РК.
- Не корректно работает алгоритм синхронизации МУП с реальным УП (из-за появления сигнала «застрев» синхронизация не происходит при расхождении МУП с реальным УП более 5 %).
- Не реализован алгоритм компенсации люфта, который бы учитывал направление предыдущей команды, время паузы (из-за вибрации люфт переходит в «среднее» положение).
При указанных недостатках МУП в зависимости от состояния РК и параметров технологического процесса, может существенно расходится с УП (рис. 2).
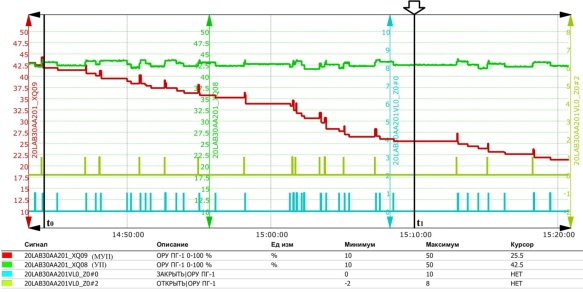
Рис. 2. Пример расхождения МУП и УП при работе регулятора
Из рис. 2 видно, что в начальный момент времени (t 0 ) когда МУП синхронизирована с УП разница показаний отсутствует. После прохождения команд на открытие/закрытие появляется рассинхронизация, которая увеличивается с увеличением команд на открытие/закрытие. После прохождения 12 команд на открытие и 28 команд на закрытие (момент времени t 1 ) величина рассинхронизации достигает значения17 %.
В виду того, что некоторым регуляторам для полноценной работы необходим сигнал с УП, и то, что оперативный персонал для оценки состояния технологического процесса использует сигнал с УП, то актуальной является задача по устранению вышеприведенных недостатков.
Все выше перечисленные недостатки сложно устранимы в виде логических схем с использованием констант, логических элементов и таймеров, а также, в виду того, что вычислительные мощности модулей ТПТС ограничены.
Для решения этой задачи можно использовать искусственную нейронную сеть [3], которая будет работать в двух режимах:
- режим обучения;
- режим работы.
Когда указатель положения находится в работе, МУП не используется в алгоритмах, поэтому это время можно использовать для обучения ИНС. При этом данные для обучения ИНС будут самые актуальные, т. к. они будут поступать до появления неисправности УП, что является явным преимуществом ИНС перед другими вариантами.
Несомненным плюсом представленной идеи является простота формирования обучающих выборок, т. к. они могут поступать в реальном времени.
Принципиальная схема работы МУП с использованием ИНС приведена на рис.3.

Рис. 3. Принципиальная схема работы МУП с использованием ИНС
При рабочем состоянии УП (отсутствии сигнала «Недостоверное состояние УП») происходит процесс постоянного обучения ИНС, на вход которой поступают сигналы о параметрах технологического процесса, которые могут вносить влияние на нелинейность перемещения регулирующего органа относительно идеальной модели (реализованной в ТПТС), команды на открытие/закрытие арматуры, а также сигнал с УП. В ходе работы алгоритма в режиме обучения, осуществляется постоянная подстройка весовых коэффициентов передаточных функций ИНС, что будет происходить до момента появления сигнала «Недостоверное состояние УП». После чего, по входным параметрам, ИНС будет вычислять положение ОР и передавать его в алгоритм регулирования и СВБУ.
Литература:
- Техническое описание алгоритмов САР, реализованных в СКУ МЗ, МПУ ТО, МПУ БОУ энергоблока. АО «АТОМТЕХЭНЕРГО» Московский филиал «Центратомтехэнерго» Москва 2019.
- Каталог типовых решений по реализации алгоритмов измерения, управления, ТЗБиС, диагностики в ПТК ТПТС АСУ ТП энергоблоков № 3, 4 Ростовской АЭС (включая спецсистемы). Ростовская АЭС Энергоблоки № 3, 4 АСУ ТП. «Центратомтехэнерго» Московский филиал ОАО «Атомтехэнерго» Москва 2011.
- Осовский С., нейронные сети для обработки информации [Текст] / Пер. с польского И. Д. Рудинского. — М.: Финансы и статистика, 2004. — 344с.

