Описывается метрологическая система сбора технологической информации в процессе бурения, что позволяет оптимизировать режимы данного процесса
Ключевые слова: бурение, микроконтроллер, информация, автоматизирование, система сбора информации.
Процесс бурения, особенно глубоких скважин, протекающий в условиях значительной неопределенности, подвергается сильным и непредсказуемым возмущающим воздействиям, основа которых — как горно-геологические, так и технико-технологические факторы. Буровики знают насколько проектный геологический разрез может отличаться от фактического, а следовательно, проектная технология бурения — от фактической. Бурильщику приходится отступать от проектной технологии, использовать свой опыт, знания, интуицию, чтобы вовремя обнаружить изменение категории буримости пород, неблагоприятную технологическую ситуацию; хорошие мастера работают на грани искусства. Поэтому научить бурить хорошо, не задавать проектные параметры режимов бурения, а варьировать ими в зависимости от условий очень сложно. Намного быстрее и дешевле научить бурильщика пользоваться системой автоматизированного управления процессом бурения, которая будет выбирать и поддерживать оптимальные режимы бурения в соответствии с заданными критериями оптимальности и в рамках установленных ограничений. С помощью систем автоматизированного управления можно более жестко нормировать процесс бурения, широко внедрять передовые технологии бурения.
Автоматизация технологических процессов на основе современной техники должна обеспечить интенсификацию производства, повышение качества и снижение себестоимости продукции. Необходимость этого вытекает из анализа производственной деятельности геологоразведочных организаций по выполнению плановых заданий. Несмотря на то, что внедрение современного оборудования, инструментов, прогрессивной технологии бурения, средств механизации и автоматизации отдельных операций, совершенствование организации труда в целом обеспечило выполнение этих заданий, в разведочном бурении остаются значительные резервы повышения производительности труда и улучшения его технико-экономических показателей. Эти резервы заключаются, прежде всего, в оптимизации и автоматизации оперативного управления процессом бурения скважин и в совершенствовании организации работ
Ниже представлена система которая предназначена для контроля технологических параметров бурения с целью оперативного управления и оптимизации режимов бурения скважин на нефть и газ. Система обеспечивает:
- автоматический сбор и обработку с расчетом производных параметров и представление текущей информации в наглядной форме на средствах отображения и регистрации бурильщика и бурового мастера;
- документирование результатов бурения в цифро-аналоговом и графическом виде, включая рапорт за смену;
- контроль выхода технологических параметров за установленные пользователем пределы со световой и звуковой сигнализацией этих событий;
- аварийную сигнализацию при выходе параметров «Вес на крюке», «Давление на входе» за предельные значения с выдачей сигналов блокировки на соответствующее буровое оборудование;
- автономное функционирование пульта бурильщика при отключении ЭВМ;
- высокую эксплуатационную надежность и долговечность при минимальных затратах на техническое обслуживание и метрологическое обеспечение.
К необходимому типовому элементу любой системы автоматического управления относятся датчики технологических параметров. Назначение датчика -преобразование контролируемой или регулируемой величины в величину другого рода, удобную для дальнейшего применения.
В системе присутствуют следующие датчики:
- датчик веса на крюке устанавливается на неподвижной ветви талевого каната. В качестве первичного преобразователя в датчике используется тензометрический силоизмерительный элемент;
- датчик контроля момента на роторе (тензометрический) устанавливается на; редукторе привода ротора вместо фиксирующей серьги-стяжки или фиксирующей опоры. Контролируется действующее на датчик усилие растяжения или сжатия;
- датчик контроля ходов насоса (индуктивный датчик приближения) устанавливается па шкиве привода насоса;
- датчик канала контроля скорости вращения ротора определяет скорость шащения вала привода ротора. В качестве первичного преобразователя применяется датчик приближения. Устанавливается на трансмиссии;
- датчик давления (тензорезисторный) устанавливается в нагнетательной линии;
- датчик глубин дает исходную информацию для расчета глубины забоя, подачи, положения тальблока. Датчик цепной передачей связан с валом лебедки;
- датчик-индикатор изменения расхода бурового раствора на выходе (в желобе) преобразует угол отклонения лопатки от вертикального положения в электрический сигнал в зависимости от уровня и скорости потока;
- датчик суммарного содержания горючих газов, выполненный на основе первичного термохимического преобразователя, монтируется вместе с датчиком-индикатором изменения расхода на выходе. Аналогичные датчики применяются — для контроля газосодержания и сигнализации во взрывоопасной зоне;
- датчик температуры на входе и выходе выполнен на основе специальной микросхемы и устанавливается, соответственно, в рабочей емкости и в желобе;
- датчик температуры воздуха (аналогичный) размещен в кабельной распределительной коробке;
- датчик момента на ключе (тензометрический) устанавливается на приводном тросе ключа;
- датчик момента на турбобуре (тензометрический) устанавливается на узел стопора ротора.
Структурная схема системы изображена на рис. 1 и состоит из следующих блоков:
- БД — блок датчиков;
- СС — схема сопряжения;
- БИ — блок интерфейса;
- БМК — блок микроконтроллера;
- ЭВМ — электронно вычислительные машины;
- СУИМ — система управления исполнительными механизмами;
- СКП — система контроля параметров;
- БЗС — блок звуковой сигнализации;
- БСС -блок световой сигнализации;
- СОИ — схема отображения информации.
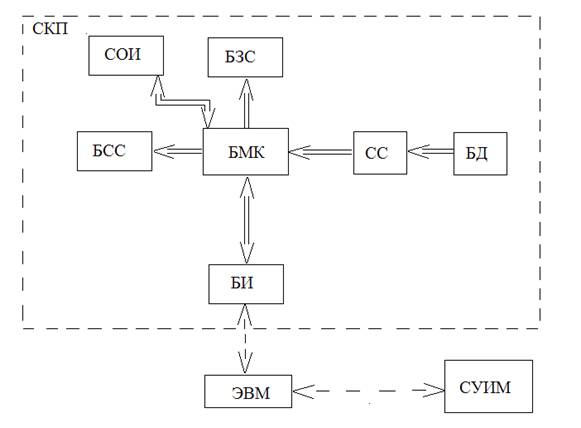
Рис. 1. Структурная схема системы
Функциональная схема системы представлена на рис.2 и состоит из следующих блоков:
- ДВКр — датчик веса на крюке;
- ДКМР — датчик контроля момента на роторе;
- ДКХН — датчик контроля хода насоса;
- ДКСВР — датчик контроля скорости вращения ротора;
- ДДНЛ — датчик давления нагнетательной линии;
- ДГ — датчик глубины;
- ДИРБРВых — датчик-индикатор измерения расхода бурового раствора на выходе;
- ДГГ — датчик горючих газов (пороговый);
- ДТВх — датчик температуры на входе;
- ДТВых — датчик температуры на выходе;
- ДТВ — датчик температуры воздуха;
- Н.О. — нуль орган;
- ДМКл — датчик момента на ключе;
- ДМТБ — датчик момента на турбобуре;
- ЭК — электронный коммутатор;
- ДРЗВ — драйвер звука;
- У — усилитель;
- БРК — блок радиоканала;
- LCD — ЖК-дисплей.
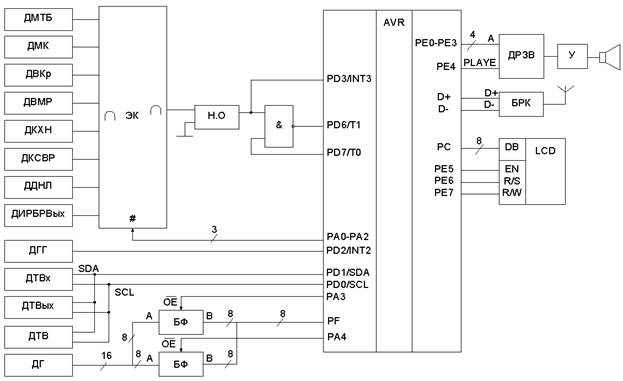
Рис. 2. Функциональная схема системы
Система является метрологической и построена по радиальному принципу. Поскольку в системе имеются датчики расположенные достаточно далеко от микроконтроллера, то применение датчиков с выходом по напряжению не оптимально, поскольку затухание сигнала трудно учесть. Исходя из этого более целесообразно применение датчиков с частотным выходом, поскольку затухание по амплитуде здесь не существенно. Без частотного преобразования подключаются цифровые датчики, поскольку здесь также амплитуда не несет информации об измеряемой величине. Датчики с частотным выходом к микроконтроллеру подключаются через электронный коммуникатор и к последовательно опрашивает датчики, при этом частоты производится методом заполнений, т. е. измеряется количеством эталонных импульсов за период неизвестного сигнала. Система звукового сопровождения и ЖК — дисплей подключены к контроллеру напрямую. В таблице 1 показаны функции портов микроконтроллера.
Таблица 1
Функции портов микроконтроллера
|
Порт |
Функции |
|
PD3/INT3 |
Сигнал запрос «прерывания» для выявления периода измеряемого сигнала |
|
PD6/T1 |
Счетчик МК для измерения периода неизвестного сигнала |
|
PD7/TO |
Таймер МК для геперации эталонных импульсов |
|
PAO — PA2 |
Линии для обслуживания электронного коммутатора |
|
PD2/INT2 |
Линия обслуживания ДГГ |
|
PD1/SDA,PDO/SCL |
Интерфейс I2C |
|
PA3,PA4 |
Линии управлениями буферами |
|
PF |
Канал обслуживания датчика глубины |
|
PEO — PE3 |
Адресные линии драйвера звука |
|
PE4 |
Линия запуска драйвера звука |
|
D+, D- |
Интерфейс USB для радиоканала |
|
PE5 — PE7 |
Управление ЖК — дисплеем |
Литература:
1. Сулакшин, А. Р. Бурение геологоразведочных скважин: справочное пособие. / А. Р. Сулакшин — М.: Недра, 1991–256 с.
2. Калинин, К. В.Разведочное бурение. / К. В. Калинин — М.: Недра, 2000–320 с.

