В статье приводится система мониторинга автотранспорта организации, которая обеспечивает контроль за несанкционированными действиями обслуживающего персонала (контроль за расходованием топлива, контроль за перемещением автотранспорта, контроль за километражем перемещения автотранспорта).
Ключевые слова: автомобиль, автотранспорт, мониторинг, датчик, микроконтроллер, координаты, GSM, GPS, уровень топлива, энкодер
У каждого предприятия, имеющего парк автомобильной техники, возникают проблемы с контролем состояния данной техники. Исходя из этого, наличие такой системы мониторинга является актуальной задачей. Автотранспортное предприятие может работать на обширных территориях с большим удалением от центральной диспетчерской службы, причем иногда в труднодоступных местах, что затрудняет контроль за несанкционированными действиями обслуживающего персонала. К таким предприятиям можно отнести станции скорой помощи, пожарные части, предприятии по благоустройству территорией, предприятии по дорожному строительству и другие.
Представлена система осуществляющая мониторинг за автотранспортом и решающая следующие задачи:
– контроль за расходованием топлива;
– контроль за перемещением автотранспорта;
– контроль за километражем перемещения автотранспорта.
Максимальное количество контролируемых машин — 100. На каждой машине установлены: датчик уровня топлива в топливном баке, схема измерения километража, модуль определения координат, радиоканал для передачи данных на центральный диспетчерский пульт. Максимальная дальность контроля автотехники — 100 км.
Далее идет речь о системе, устанавливаемая на автомобиле. Принимающая сторона на центральном пульте не рассматривается.
На рисунке 1 представлена структурная схема, на которой обозначено:
– ДУТ — датчик уровня топлива. Служит для измерения уровня топлива в топливном баке;
– ДК — датчик километража. Служит для измерения пути пройденной автотехникой;
– СОК — схема определения координат. Служит для определения местоположения автотехники;
– БРк — блок радиоканала. Служит для передачи данных на центральный диспетчерский пульт;
– БМк — блок микроконтроллера. Является центральным управляющим звеном системы;
– Т — таймер реального времени. Предназначен для подсчета временных интервалов.
– ОЗУ — оперативное запоминающее устройство. Предназначено для запоминания измеренных данных.
– БИ — блок интерфейса. Связывает проектируемую систему с другими системами автомобиля.
Структурная схема системы представлена на рисунке 1.
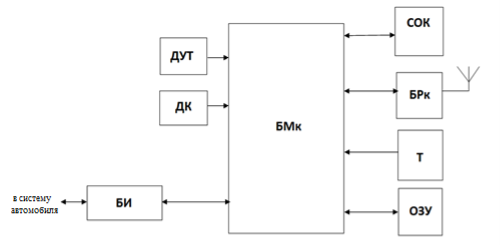
Рис. 1. Структурная схема системы
Ниже представлена функциональная схема системы.
Блоки системы следующие:
– Э — энкодер. Сообщает микроконтроллеру данные о направлении движения и позволяет вычислить пройденный километраж.
– ЧРВ — часы реального времени. Ведут подсчет временных интервалов.
– П — память системы. Служит для запоминания измеренной информации при отсутствии связи с последующей передачей при наличии связи.
– GSM — схема организации канала сотовой связи.
– AVR — центральный микроконтроллер. Управляет всей системой и производит необходимые вычисления.
– GPS — схема определения географических координат автомобиля.
– ДУТ — датчик уровня топлива. Сообщает микроконтроллеру об уровне топлива в баке.
– СП — супервизор питания. Формирует сигнал сброса для микроконтроллера.
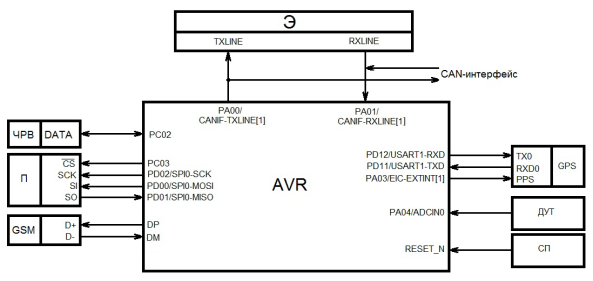
Рис. 2. Функциональная схема системы
Система построена по радиальному принципу и работает следующим образом. Центральным звеном является микроконтроллер, который имеет прямую информационную связь со всеми блоками системы.
Энкодер сообщает микропроцессору о текущем абсолютном угле поворота контролируемого колеса. В результате микроконтроллер может определить направление движения (вперед, назад, стоянка) и пройденный километраж. Энкодер обслуживается по CAN-интерфейсу.
Часы реального времени сообщаю текущее время микроконтроллеру и обслуживаются по интерфейсу 1-Wire.
Память системы обслуживается по интерфейсу SPI и предназначена для запоминания данных измерений.
GSM-модуль предназначен для организации канала сотовой связь и обслуживается по интерфейсу USB. Данный GSM-модуль используется постоянно после каждого цикла измерений. В цикл измерения входит опрос энкодера, часов реального времени, датчика уровня топлива и GSM-модуля. Передается информация о текущей географической координате, текущем уровне топлива направление движения. Если в данный момент сотовая связь отсутствует то результаты измерения с временными отметками запоминаются в памяти системы с последующей передачей посредством GPS-модуля при наличии связи. Каждый цикл измерения повторяется через одну минуту. Энкодер опрашивается чаще.
В системе предполагается использование следующих элементов.
Микроконтроллер AT32UC3C2512C. AVR32 UC3 — это 32-разрядмое процессорное ядро разработки 2007 года, ориентированное на широкий круг задач, в которых требуется применение мал о потребляющего быстродействующего 32-разрядного микроконтроллера с высокой степенью интеграции, снабженного Flash-памятью и ОЗУ. Ядро процессора является упрошенной версией ядра AVR32, но ориентировано оно на рынок изделий, где традиционно применяются процессоры класса ARM7 и Cortex-МЗ. Благодаря тому, что ядро AVR32 UC3 разрабатывалось совсем недавно, в нем учтены недостатки выпушенных ранее решений и требования современного рынка к 32-разрядным процессорам общего назначения.
Таблица 1
Параметры микропроцессора
|
ЦПУ: Ядро |
AVR32 | |
|
ЦПУ: F, МГц |
от 0 до 66 | |
|
Память: Flash, Кбайт |
256 | |
|
Память: RAM, Кбайт |
64 | |
|
I/O (макс).шт. |
45 | |
|
Таймеры: 16-бит.шт |
3 | |
|
Таймеры: Каналов ШИМ.шт. |
15 | |
|
Таймеры RTC |
Да | |
|
Интерфейсы: UART, шт. |
4 | |
|
Интерфейсы: SPI, шт. |
1 | |
|
Интерфейсы: I2C, шт. |
2 | |
|
Интерфейсы: USB, шт. |
1 | |
|
Интерфейсы: САN, шт. |
2 | |
|
Интерфейсы: Etnernet, шт. |
1 | |
|
Интерфейсы: DMA, шт. |
5 | |
|
Интерфейсы LIN, шт. |
12 | |
|
Аналоговые входы. Разрядов АЦП, бит |
12 | |
|
Аналоговые входы: Каналов АЦП, шт. |
5 | |
|
Аналоговые входы: Быстродействие АЦП, kSPS |
2000 | |
|
Аналоговые входы Аналоговый компаратор, шт |
-5 | |
|
Аналоговые выходы: Разрядов ЦАП,.бит |
12 | |
|
Аналоговые выходы Каналов ЦАП, шт. |
2 | |
|
vcc, В |
от 3 до 5.5 |
Абсолютный энкодер CEV58— DN.

Рис.3 Абсолютный энкодер CEV58 — DN
Таблица 2
Параметры CEV58— DN
|
Напряжение питания |
11...27В |
|
Потребление тока без нагрузки |
<= 350 мА |
|
Тип |
Одно-/многооборотный |
|
Общее разрешение |
<= 31 бит |
|
Число шагов на оборот |
<=8192 |
|
Число оборотов |
<= 256000 |
|
Выходной код |
25 бит |
|
Интерфейс |
CAN DeviceNet. EN 50325–2 |
|
Спецификация CAN 2.0 А |
11-битный идентификатор |
|
Скорость передачи данных |
125, 250, 500 кбит/с |
GPS— модуль. В проекте используется модуль EB-500 предназначены для встраивания в мобильные устройства поэтому имеет весьма небольшие габариты 13 x 15 x 2.2 мм. Модуль умеет работать как с пассивными, так и с активными антеннами.
Для того чтобы с большой точностью определять координаты, приемник должен принять сигнал как минимум с трех спутников. При увеличении числа спутников, с которых ловится сигнал, увеличивается и точность вычисления координат приемника. EB-500 имеет 66 каналов, для обнаружения спутников, их слежения и сохранения положения в пространстве. Благодаря этому время горячего старта — Hotstart (когда спутники уже найдены и сохранены в памяти модуля), согласно документации, составляет всего 1,5 секунды. Тогда как время холодного старта от 35 секунд. Эти времена указаны при ясном небе без видимых помех и с хорошей антенной. Так как модуль предназначен для мобильных устройств, питающихся от батарей, то диапазон питающих напряжений стандартный — от 4,2 до 3,0 вольт. Потребление модуля во время работы менее 28мА.
Часы реального времени DS1904. RTC iButton DS1904 является модулем часов реального времени, доступ к которым может быть осуществлен с минимальными аппаратными затратами. Передача данных производится последовательно, с применением протокола 1-Wire, который требует наличия всего одного провода данных и контакта корпуса. DS1904 имеет свой уникальный 64-х разрядный ROM- регистрационный номер, зашиваемый в чип лазером на стадии производства и часы реального времени/ календарь, реализованные в виде двоичного счетчика. Прочный MicroCan корпус имеет высокую устойчивость к воздействию внешних неблагоприятных факторов, таких как загрязнение, влажность и вибрация. Аксессуары DS1904 позволяют закрепить его практически на любой поверхности, включая печатные платы и пластмассовые брелоки для ключей. Дополнительно DS1904 имеет такие функции, как календарь, штамп времени и даты, секундомер, счетчик часов, таймер интервалов и формуляр к любому типу электронных устройств или программного обеспечения, используемого микроконтроллерами.
GSM-модуль. iRZMC52PU- конструктивно законченный GSM модем, предназначенный для приема и передачи данных, текстовых сообщений и факсов. Отлично приспособлен как для обеспечения мобильного доступа к сети Интернет, так и для промышленных приложений — телеметрии, беспроводного сбора данных с датчиков, дистанционного наблюдения и сигнализирования. Управление осуществляется стандартными АТ-командами. Модем оборудован светодиодом, позволяющим отслеживать статус соединения.
Основные характеристики:
– диапазоны частот: GSM 900 1800 МГц или S50 900 1800 1900 МГц (определяется GSM модулем)
– выходная мощность 2W (класс 4 для EGSM900).
– GPRS класс 8/10 (определяется GSM-модулем):
– TCP/IP стек, доступный через АТ-команды:
– МС класс В:
– CSD до 14.4 kbps;
– USSD:
– SMS:
– передача голоса:
– факс — группа 3: класс 1.
– напряжение питания от 9 до 25 В.
Интерфейсы:
– разъём RJ11 для подключения питания.
– разъём USB В для подключения USB интерфейса.
– разъём DB9 для подключения RS-232 интерфейса.
– разъём FME для подключения GSM антенны
Модем MC52PU представляет собой компактное устройство, выполненное в пластмассовом корпусе.
Таким образом, представленная система позволяет более качественно организовать работу имеющегося автотранспорта, исключить несанкционированное его использование, а также различные манипуляции с топливом.
Литература:
- Барканов, П. А. Справочник конструктора РЭА: компоненты, механизмы, надежность / П. А. Барканов, Б. Е. Бердиневский, П. Д. Верхопятницкий. — М.: Радио и связь, 1985. — 384 с.
- Борщенко, Я.А., Васильев, В. И. Электронные и микропроцессорные системы автомобилей: Учебное пособие. / Я. А. Борщенко, В. И. Васильев. — Курган: Изд-во Курганского гос. ун-та, 2007.- 207 с.
3. Быков, Б. В. Основы конструкции современного автомобиля / Б. В. Быков — М.: Маршрут, 2004. — 36 с.
4. Гаврилов, К. Л. Профессиональная диагностика ДВС, систем: топливоснабжения, зажигания, энергосбережения, пуска: Учебник для вузов автомобильного трансп. / К. Л. Гаврилов. 3-е изд., перераб. и доп. — М.: Транспорт, 1980. — 439 с.

