В статье представлена структурная схема замкнутой системы ПЧ-АД с нелинейным корректирующим устройством. Дается математическое описание динамики замкнутой системы «Преобразователь частоты – асинхронный двигатель»с короткозамкнутым ротором. Приводится алгоритм параметрического синтеза системы управления ПЧ-АД.
Ключевые слова: структурная схема, преобразователь частоты, короткозамкнутый ротор, алгоритм.
The block diagram of the closed system of PCh-AD is presented in article with the nonlinear correcting device. The frequency converter — the asynchronous engine with a short-circuited rotor is given the mathematical description of dynamics of the closed system. The algorithm of parametrical synthesis of a control system of PCh-AD is given.
Keywords: block diagram, frequency converter, short-circuited rotor, algorithm.
Нелинейное корректирующее устройство замкнутой системы «Преобразователь частоты – асинхронный двигатель» с короткозамкнутым ротором аналогично звену переменной структуры. Нелинейное корректирующее устройство (НКУ) придает системе как бы свойство самонастройки по величине ошибки, возникающей в системе в процессе управления [1]. Структурная схема системы «Преобразователь частоты – асинхронный двигатель» (ПЧ-АД) [2] с нелинейным корректирующим устройством [1] представлена на рисунке 1.
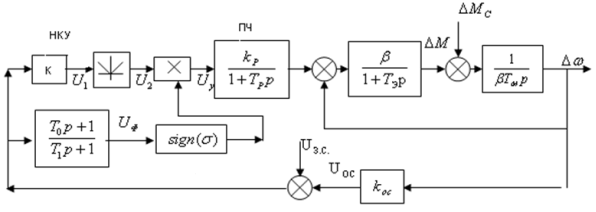
Рис. 1. Структурная схема замкнутой системы ПЧ-АД с НКУ
На рисунке 1 верхний канал НКУ представлен пропорциональным звеном и звеном модуля, нижний канал представлен передаточной функцией (инерционно-форсирующее звено) и нелинейным звеном ![]() . Входные сигналы на выходе НКУ умножаются, в результате чего создается управляющее воздействие
. Входные сигналы на выходе НКУ умножаются, в результате чего создается управляющее воздействие ![]()
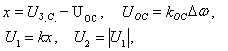
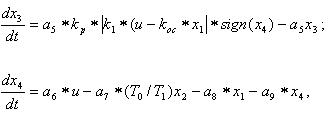
Для решения задачи синтеза рассмотрим математическое описание динамики замкнутой системы ПЧ-АД с нелинейным корректирующим устройством.
Математическое описание динамики системы имеет следующий вид:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
 (5)
(5)
![]() (6)
(6)
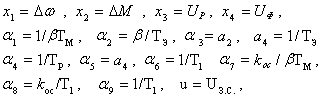
Где:![]() приращение скорости двигателя;
приращение скорости двигателя; ![]() приращение момента двигателя;
приращение момента двигателя; ![]() приращение напряжения с выхода ПЧ;
приращение напряжения с выхода ПЧ; ![]() выходное напряжение линейного фильтра НКУ;
выходное напряжение линейного фильтра НКУ; ![]() модуль жесткости механической характеристики;
модуль жесткости механической характеристики; ![]() эквивалентная электромагнитная постоянная времени цепей статора и ротора двигателя;
эквивалентная электромагнитная постоянная времени цепей статора и ротора двигателя; ![]() постоянная времени цепи управления ПЧ;
постоянная времени цепи управления ПЧ; ![]() электромеханическая постоянная времени двигателя;
электромеханическая постоянная времени двигателя; ![]() передаточный коэффициент ПЧ;
передаточный коэффициент ПЧ; ![]() коэффициент обратной связи по скорости;
коэффициент обратной связи по скорости; ![]() напряжение на выходе задатчика интенсивности.
напряжение на выходе задатчика интенсивности.
Задача синтеза параметров нелинейного корректирующего устройства заключается в определении коэффициента ![]() (верхнего канала) и постоянных времени линейного фильтра
(верхнего канала) и постоянных времени линейного фильтра ![]() НКУ. Кроме этого, осуществляется синтез коэффициента передачи преобразователя частоты
НКУ. Кроме этого, осуществляется синтез коэффициента передачи преобразователя частоты ![]() . Численное значение коэффициента обратной связи
. Численное значение коэффициента обратной связи ![]() задается. Параметры асинхронного двигателя с короткозамкнутым ротором рассчитываются. После несложных преобразований уравнений (1-6), с учетом
задается. Параметры асинхронного двигателя с короткозамкнутым ротором рассчитываются. После несложных преобразований уравнений (1-6), с учетом ![]() , уравнения (1-6) будут иметь следующий вид:
, уравнения (1-6) будут иметь следующий вид:![]()
![]() (7)
(7)
![]() ;(8)
;(8)
 (9)
(9)
Где:
Структурная схема алгоритма параметрического синтеза нелинейной системы управления приведена на рисунке 2. Структурная схема алгоритма построена на основании [3].
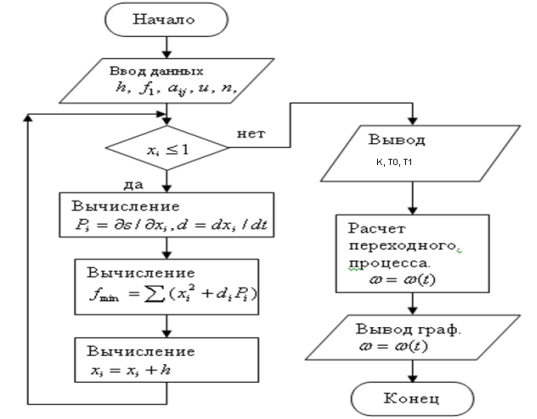
Рис. 2. Структурная схема алгоритма параметрического синтеза замкнутой нелинейной системы ПЧ-АД
Алгоритм вычисления параметров заключается в следующем:
-
Вводится величина шага
 переменных
переменных  , начальное приближение функции многих переменных
, начальное приближение функции многих переменных  , численные значения коэффициентов
, численные значения коэффициентов  функции квадратичной формы, напряжение задающего сигнала
функции квадратичной формы, напряжение задающего сигнала  , порядок системы дифференциальных уравнений
, порядок системы дифференциальных уравнений  ;
;
-
Проверяется условие выполнения неравенства численного значения переменной
 ;
;
-
Вычисляются частные производные
 функции
функции  квадратичной формы по каждой переменной
квадратичной формы по каждой переменной  ;
;
-
Вычисляются численные значения правой части системы дифференциальных уравнений
 ;
;
-
Вычисляется минимум функции
 равная
равная 
-
Вычисляется новые численные значения переменных
 с передачей управления счета на проверку условия не превышения заданной верхней границы переменных
с передачей управления счета на проверку условия не превышения заданной верхней границы переменных  ;
;
-
В случае невыполнения условия выводятся рассчитанные значения коэффициентов
 и постоянных времени
и постоянных времени  ;
;
- Расчет переходного процесса скорости системы ПЧ-АД осуществляется методом Рунге-Кутта [4];
- Для визуального наблюдения за качеством переходного процесса скорости график скорости и момента двигателя выводится на экран дисплея.
Следует отметить, что задача синтеза параметров замкнутой системы ПЧ-АД решается в MATLAB, где одновременно с выводом на экран дисплей кривой переходного процесса скорости и момента осуществляется вывод параметров нелинейного корректирующего устройства ![]() , передаточного коэффициента преобразователя частоты
, передаточного коэффициента преобразователя частоты ![]() . На рисунке 3 представлены графики переходного процесса угловой скорости и момента асинхронного двигателя. Исходя из требований к качеству переходного процесса скорости двигателя (перерегулирование, число колебаний и время регулирования), выбирается следующий график переходного процесса скорости, представленный на рисунке 3.
. На рисунке 3 представлены графики переходного процесса угловой скорости и момента асинхронного двигателя. Исходя из требований к качеству переходного процесса скорости двигателя (перерегулирование, число колебаний и время регулирования), выбирается следующий график переходного процесса скорости, представленный на рисунке 3.
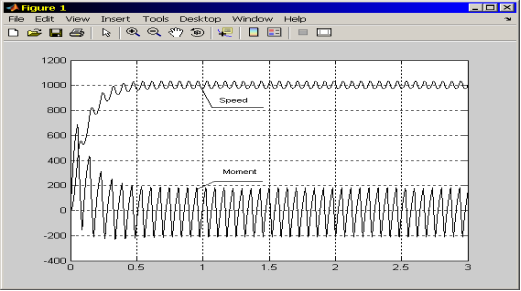
Рис. 3. График переходного процесса скорости
Результаты счета программы следующие:
![]() (10)
(10)
Как видно из рисунка 3, график переходного процесса скорости выбран без перерегулирования и колебаний, что соответствует требованиям предъявляемые к нелинейным системам ПЧ-АД.
Выводы. Разработана структурная схема замкнутой системы ПЧ-АД с нелинейным корректирующим устройством.
Разработана математическая модель динамики замкнутой системы «Преобразователь частоты – асинхронный двигатель» с короткозамкнутым ротором.
Разработан алгоритм параметрического синтеза системы управления ПЧ-АД.
Литература:
- Попов Е. П. Теория нелинейных систем автоматического регулирования и управления. — М.: Наука, 1988.
- Tерехов В. Н., Осипов О. И. Системы управления электроприводов. — М.: Академия, 2006.
- Сагитов П. И., Тергемес К. Т., Шадхин Ю. И. Параметрический синтез системы управления многодвигательного асинхронного электропривода. // Вестник Алматинского университета энергетики и связи. — 2011. — № 2(13).
- Алексеев Е. Р., Чеснокова О. В. MATLAB 7 / Алексеев Е. Р., Чеснокова О. В. — М.: НТ Пресс, 2006.

