




Автономный дирижабль для мониторинга местности
Авторы: Чепрасова Анастасия Сергеевна, Мамелин Юрий Валерьевич, Якуба Денис Юрьевич
Рубрика: 3. Автоматика и вычислительная техника
Опубликовано в
IV международная научная конференция «Современные тенденции технических наук» (Казань, октябрь 2015)
Дата публикации: 07.10.2015
Статья просмотрена: 371 раз
Библиографическое описание:
Чепрасова, А. С. Автономный дирижабль для мониторинга местности / А. С. Чепрасова, Ю. В. Мамелин, Д. Ю. Якуба. — Текст : непосредственный // Современные тенденции технических наук : материалы IV Междунар. науч. конф. (г. Казань, октябрь 2015 г.). — Казань : Бук, 2015. — С. 27-30. — URL: https://moluch.ru/conf/tech/archive/163/8881/ (дата обращения: 19.04.2024).
Дирижабль — летательный аппарат легче воздуха. Он представляет собой комбинацию аэростата с силовой установкой (например, двигатель внутреннего сгорания с воздушным винтом) и системой управления (рули управления), благодаря чему дирижабль может двигаться в любом направлении независимо от воздушных потоков.
Изобретателем дирижабля считается Жан Батист Мари Шарль Мёнье. Дирижабль Мёнье должен был быть сделан в форме эллипсоида. Управляемость должна была быть осуществлена с помощью трёх пропеллеров, вращаемых вручную усилиями 80 человек. Изменяя объём газа в аэростате путём использования баллонета, можно было регулировать высоту полёта дирижабля, и поэтому он предложил две оболочки — внешнюю основную и внутреннюю.
На сегодняшний день конструкция дирижабля представляет собой оболочку для размещения газа, который будет легче воздуха, систему управления подъемной силой, основная задача которой в том, что бы скомпенсировать влияние метеоусловий и компенсировать уменьшение массы аппарата, а так же обеспечить возможность вертикальной посадки. В данной системе используется аэродинамическая подъемная сила оболочки, возникающая при увеличении угла ее атаки, а также путём сжатия атмосферного воздуха и хранения его в баллонетах внутри оболочки или выпуска его из баллонетов. Кроме того, в состав оболочки обязательно включаются газовые (для несущего газа) предохранительные клапаны (для предупреждения разрыва оболочки из-за увеличения растягивающих оболочку сил при увеличении высоты полёта и при увеличении в ней температуры), а также предохранительные воздушные клапаны на воздушных баллонетах. Газовые клапаны открываются только после того, когда полностью опорожнятся воздушные баллонеты. Кроме оболочки, гондол и движителя в конструкции классического дирижабля предусмотрена обычно простейшая гравитационная и аэродинамическая система управления ориентацией и стабилизацией аппарата.
Конструкция дирижабля, её экологичность и экономия затрат на изготовления по сей день дают широкий спектр применения. Его используют во многих отраслях начиная с туризма и заканчивая военным делом. Так же интересно и малоизученно его применение в современной робототехнике. Дирижабль возможно сделать незаменимым летательным аппаратом для изучения труднодоступных мест или составления общей картины некоторого участка земли. Главной сложностью этого проекта остается система сенсорного управления (ССУ) мини-дирижабля с видео камерой, который можно использовать для мониторинга местности. Для проектирования СДУ необходимо в первую очередь разобраться с простой системой управления стандартного дирижабля.
Об управлении.
Управление дирижаблем в горизонтальной плоскости, как и для каждого корабля, служит для удержания определенного курса. Без указанного управления происходит постоянное изменение направления: только при помощи управления можно взять новый курс.
Способ управления дирижаблем включает управление двигателями, контроль параметров движения дирижабля из центров управления в носовой и кормовой частях, которые выполнены с возможностью изменения функций и прикреплены снизу к оболочке дирижабля. При этом создается вращение дирижабля в вертикальной и/или горизонтальной плоскости. Обратимый дирижабль имеет жесткую оболочку в форме эллипсоида с несущим газом, двигатели с винтовыми движителями, идентичные гондолы с главным и резервным центрами управления соответственно в носовой и кормовой частях дирижабля, которые прикреплены снизу к оболочке и выполнены с возможность обмена функций. Дирижабль снабжен неподвижными крестообразными кронштейнами на окончаниях носовой и кормовой частей, имеет реверсивные двигатели с винтовыми движителями, которые установлены на перекладинах упомянутых кронштейнов. Технический результат — повышение надежности управления.
Дирижабли, имеющие винтовые движители и аэродинамические рули курса и высоты, которые работают за счет энергии набегающих потоков воздуха, выполняют поворот в горизонтальной или вертикальной плоскости в следующей последовательности:
- дирижаблю придают скорость, при которой рули работают эффективно;
- поворачивают рули курса или высоты, которые поворачивают дирижабль за счет энергии набегающих потоков воздуха;
- следят за значением угла поворота дирижабля;
- при достижении углом поворота дирижабля требуемого значения рули устанавливают в начальное положение.
При нулевой скорости дирижабля относительно окружающего воздуха и при значительной инерционности дирижабля время выполнения поворота, особенно на угол более 90°, и его траектория могут оказаться недопустимо большими. Практически все дирижабли не могут перемещаться «задним ходом» — кормой вперед, т. к. при этом его аэродинамическая схема из статической становится астатической, т. е. неустойчивой. Изменения направления движения на 180° по классическому способу, описанному выше, производится за наибольшее время и по самой длинной траектории.
Тот факт, что при свободном или закрепленном в любом положении руле дирижабль описывает рулевой круг, дает возможность измерить во время полета направление и силу ветра, не зная воздушной скорости дирижабля, Таким образом, если дирижабль описал один раз рулевой круг, то это показывает, что его килевое направление стало параллельным исходному направлению, т. е. он вернулся как бы опять к тем частицам воздуха, которые он покинул, тут он опять мог бы встретить небольшой выпущенный с него уравновешенный аэростат. Отсюда мы можем сделать простой вывод: если во время полета необходимо измерить скорость ветра, то руль должен быть отпущен или же закреплен в любом положении, если дирижабль повернулся примерно на 90°, то мы можем принять, что дирижабль стал описывать рулевой круг.
Теперь перейдем непосредственно к системе сенсорного управления мини-дирижаблем, оснащенного видео камерой.
ССУ мини-дирижабля.
Нашей целью является разработка системы технического зрения для обнаружении траектории движения (в лабораторных условиях — линия), разработка курсового регулятора, учитывающего факторы положения выбранной траектории движения и угла ее отклонения относительно дирижабля, разработка регулятора высоты и разработка системы дистанционного управления.
Конструкция мини-дирижабля основана на простых компонентах в виде фольгированных шариков, заполненных легким газом.
Аппаратная часть мини-дирижабля состоит из:
- raspberry pi — одноплатный компьютер;
- широкоугольной Веб камеры;
- ультразвукового датчика высоты hc-sr05;
- двух электродвигателей;
- сервопривода отклонения тяги двигателей;
- подсистемы питания.
Поворот мини-дирижабля вокруг вертикальной оси осуществляется разнотягом двигателей. Регулировка высоты дирижабля осуществляется отклонением вектора тяги двигателей по вертикальной оси.
Двигатели дирижабля имеют возможности установки максимальной скорости вращения в 4000 об. / мин. Рабочее напряжение двигателей 12 вольт. Двигатели разнесены от центра дирижабля на 30 см., и находятся в нижней точке дирижабля.
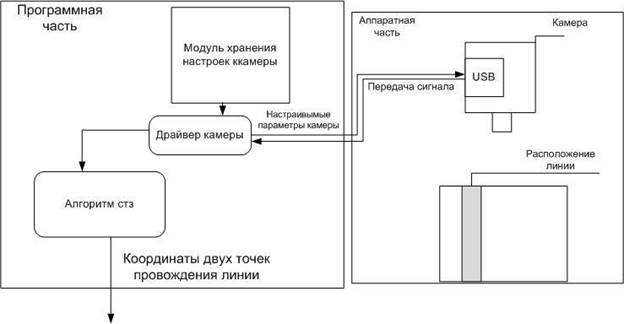
Техническое зрение мини-дирижабля состоит из аппаратной и программной частей.
Аппаратная часть связана с программной частью проводным соединением, где передается уже сформированный сигнал формата MJPG. В аппаратную часть входит веб камера.
В программную часть входит:
- драйвер камеры для получения видео изображения формата MJPG и задания настроек камеры;
- модуль обработки изображения.
С учетом выбранного метода обработки и алгоритма определения расположения линии были выявлены в программной реализации следующие подзадачи:
- произвести настройку внутренних параметров видеокамеры;
- получить изображение с камеры;
- преобразовать изображение из формата MJPG в цветовой формат HSV;
- организовать поиск области пересечения по цветовому соответствию;
- реализовать алгоритм для определения координат точки пересечения,
- отфильтровывая не полезный сигнал;
- реализовать интегрирование блока СТЗ с блоком регулятора направления.
Получение изображение с камеры и преобразование в цветовой формат HSV возложены на библиотеку opencv.
Регулятор направления так же состоит из программной и аппаратной части, у каждой из которых свой алгоритм реализации.
Программная реализация состоит из:
- нечеткого регулятора;
- математического модуля просчета поворота линии;
- программного ШИМа.
Аппаратная реализация состоит из:
- Драйвера двигателя L293DNE;
- Левого и правого электродвигателя.
Структурная схема регулятора направления состоит из программной части, основанной на нечетком регуляторе. Алгоритмом дефазификации является алгоритм Мамдани.
Применение программного ШИМа обусловлена отсутствием в используемом одноплатном компьютере Raspberry pi аппаратного ШИМа.
Драйвер двигателя применяется для усиления ШИМ сигнала.
Программная и аппаратная составляющая регулятора высоты следующие:
Программная реализация состоит из:
- ПИ регулятора на нечеткой логике;
- математического модуля расчета расстояния;
- программного ШИМа;
Аппаратная часть Raspberry pi состоит из Процессора bcm2835, соединяющего gpio выводы по результатам работы программного ШИМа.
Аппаратная реализация состоит из:
- Сервопривода, изменяющего вектор тяги двигателей;
- Ультразвукового датчика HC-SR05.
И одна из самых важных составляющих данного проекта, система дистанционного управления (СДУ)
СДУ реализовано в управлении разности тяговых моментов на двигателях. Принцип реализации позаимствован у компьютерных игр, когда нажатие на кнопку реализует плавное отклонение тяговых моментов, а отпускание — плавное возвращение, таким образом в некоторых пределах можно поддерживать разность тяги двигателей.
Передача сигналов нажатия клавиш осуществляется через беспроводной канал wi-fi по протоколу ssh, при котором от наземной базовой стации (ПК) нажатие клавиш клавиатуры передается на удаленный компьютер.
Передача видео потока осуществляется таким же способом ввиду того, что протокол ssh позволяет наблюдать экран удаленной машины.
Таким образом, получился лабораторный прототип мини-дирижабля, который в последствие сможет осуществлять более сложные задачи. С его помощью можно будет подробно составить карту небольшого участка местности, например полей и изучить более засушливые участки или участки пораженные насекомыми и птицами. Появится возможность мониторинга заповедников, без людского вмешательства и многое другое. Главное преимущество дирижабля, по сравнению с распространенными беспилотниками коптерами является длительность полета и дальность. Конструкция дирижабля позволяет удерживать его в воздухе с гораздо меньшей затратой ресурсов и гораздо большее время, нежели коптеры.
Литература:
1. Ионов П. Дирижабли и их военное применение. — М.: Государственное военное издательство, 1933. — 120 с. — Тираж 10000.
2. Система управления мини-дирижаблем / Хабрахабр. [Электронный ресурс]. — URL: http://habrahabr.ru/post/234609/ (дата обращения: 30.09.2015).
3. Шульгин Н. Б.: Способ управления дирижаблем и реализующее устройство — обратимый дирижабль.
Похожие статьи
Концепция стратосферного многоцелевого дирижабля с лазерным...
Скачать Часть 2 (pdf). Библиографическое описание
Подход к искомой реализации требует в рамках данной статьи найти решение наиболее важных на начальном этапе создания ЛСМД научно-технических задач: 1. создание дирижабля с техническими характеристиками...
Аппаратная реализация искусственных нейронных сетей. Часть 1
Рассмотрены типы искусственных нейронных сетей. Представлены методы аппаратной реализации искусственных нейронных сетей с использованиеманалоговых, либо цифровых схем нейрон-синапсов.
Модель системы освещения на основе микроконтроллера.
Аппаратная часть представляет собой набор смонтированных печатных плат.
Программная часть состоит из программной оболочки (IDE) для написания программ, их компиляции и программирования аппаратуры.
Из опыта использования Arduino в курсовом и дипломном...
Профессиональный модуль ПМ 02, в состав которого входит МДК 02.01 «Микропроцессорные системы», является частью основной
Основными характеристиками SCADA-систем являются: программно-аппаратные платформы, на которых реализована система.
Алгоритмы помехоустойчивого кодирования и их аппаратная...
Аппаратные реализации стоят дороже, чем программные, так как используют дополнительную аппаратуру для выполнения операций. При этом они разгружают центральный процессор и системную шину и позволяют увеличить быстродействие...
Анализ работы интегрированного комплекса авионики
Система встроенного контроля представляет собой совокупность программно-аппаратных средств.
Таким образом, память разделена на две части- для запоминания неисправностей в полете и на земле.
Гидравлическая система летательных аппаратов: вертолета...
Основными составными частями гидропривода являются гидродвигатели и гидронасосы (либо гидромуфты), которые являются гидромашинами. Все агрегаты гидравлической системы соединяются посредством трубопроводов, по которым перемещается рабочая жидкость.
Устройство сопряжения объектов для авиационного тренажера
Интерфейсная машина — это программно-аппаратный комплекс, состоящий из программных компонентов, работающих поверх стандартной
Система управления может быть разбита на две части: цифровую (унифицированную и легко настраиваемую для любой системы...
Применение мультироторных летательных аппаратов в оценке...
Скачать Часть 2 (pdf).
Материалы дистанционного зондирования получают в результате неконтактной съемки с летательных воздушных (самолетов, дирижаблей) и космических аппаратов.
Похожие статьи
Концепция стратосферного многоцелевого дирижабля с лазерным...
Скачать Часть 2 (pdf). Библиографическое описание
Подход к искомой реализации требует в рамках данной статьи найти решение наиболее важных на начальном этапе создания ЛСМД научно-технических задач: 1. создание дирижабля с техническими характеристиками...
Аппаратная реализация искусственных нейронных сетей. Часть 1
Рассмотрены типы искусственных нейронных сетей. Представлены методы аппаратной реализации искусственных нейронных сетей с использованиеманалоговых, либо цифровых схем нейрон-синапсов.
Модель системы освещения на основе микроконтроллера.
Аппаратная часть представляет собой набор смонтированных печатных плат.
Программная часть состоит из программной оболочки (IDE) для написания программ, их компиляции и программирования аппаратуры.
Из опыта использования Arduino в курсовом и дипломном...
Профессиональный модуль ПМ 02, в состав которого входит МДК 02.01 «Микропроцессорные системы», является частью основной
Основными характеристиками SCADA-систем являются: программно-аппаратные платформы, на которых реализована система.
Алгоритмы помехоустойчивого кодирования и их аппаратная...
Аппаратные реализации стоят дороже, чем программные, так как используют дополнительную аппаратуру для выполнения операций. При этом они разгружают центральный процессор и системную шину и позволяют увеличить быстродействие...
Анализ работы интегрированного комплекса авионики
Система встроенного контроля представляет собой совокупность программно-аппаратных средств.
Таким образом, память разделена на две части- для запоминания неисправностей в полете и на земле.
Гидравлическая система летательных аппаратов: вертолета...
Основными составными частями гидропривода являются гидродвигатели и гидронасосы (либо гидромуфты), которые являются гидромашинами. Все агрегаты гидравлической системы соединяются посредством трубопроводов, по которым перемещается рабочая жидкость.
Устройство сопряжения объектов для авиационного тренажера
Интерфейсная машина — это программно-аппаратный комплекс, состоящий из программных компонентов, работающих поверх стандартной
Система управления может быть разбита на две части: цифровую (унифицированную и легко настраиваемую для любой системы...
Применение мультироторных летательных аппаратов в оценке...
Скачать Часть 2 (pdf).
Материалы дистанционного зондирования получают в результате неконтактной съемки с летательных воздушных (самолетов, дирижаблей) и космических аппаратов.




