




Im gegebenen Artikel ist das Suche-und-Erkennungalgorithmus der Verkehrszeichen nach der Analyse der Videoreihenfolge vorgeschlagen. Die Ausführung des Algorithmus geht in fünf Hauptetappen. Jeder von denen stellt zusätzlich Minialgorithmen dar. Ebenso sind die Ergebnisse im Verlauf der Ausführung auf jeder der Hauptetappen angeführt und ebenso ist die Genauigkeit der Ausführung des Algorithmus bestimmt.
Schlüsselwörter: der Algorithmus, die Lokalisation, die Erkennung, die Videoreihenfolge, das Bild, die morphometrische Merkmale.
In den modernen informationskommunikativen Systemen erwerben die visuellen Erkennungssysteme von Computern immer größere Popularität. Diese Systeme lassen verschiedene Arbeitsprozesse auf den verschiedensten Gebieten automatisieren. Die Autoproduzenten zeigten das besondere Interesse für die gegebenen Entwicklungen. Für die Realisierung der aktiven Sicherheitssysteme gewinnen die Suche und die Erkennung von den Wegmarkierungselementen sowie den Verkehrszeichen zunehmend an Bedeutung. Zur Zeit sind in den kommerziellen Betrieben die folgenden Systeme gestartet: die Gesellschaft General Motors verwendet in den Autos der Marke Opel die Systeme von Opel Eye; die Gesellschaft BMW AG verwendet das System BMW TSR; die Gesellschaft Daimler AG begann den Betrieb zweier Systeme Mercedes-Benz Speed Limit Assist und Crosswind Assist, die sich auf der Verkehrszeichenerkennung gründen. Hierbei gilt es zu berücksichtigen, dass die vorhandenen Systeme und die Algorithmen eine Reihe von wesentlichen Mängeln haben: eine qualitativ mangelhafte Arbeit bei schlechten Sichtverhältnissen; die Arbeitsmöglichkeit nur im aufgegebenen Geschwindigkeitsintervall der Autobewegung; das begrenzte Spektrum von Verkehrszeichen (vor allem die Beschränkung der Geschwindigkeit), und die Verwendungsmöglichkeit in der begrenzten Zahl von Ländern (was mit den Unterschieden in den Verkehrszeichenstandards verbunden ist). Das alles erlaubt nicht, solche Systeme und Algorithmen breit zu verwenden, infolgedessen ist die Ausarbeitung der Algorithmen sowie der Suche- und Erkennungssysteme von Verkehrszeichen eine aktuelle Aufgabe.
Das Ziel der vorliegenden Arbeit ist die Ausarbeitung des Suche-und- Erkennungsalgorithmus von Verkehrszeichen nach der Analyse der Videoreihenfolge.
Als Videoreihenfolge treten die mit den ins Auto eingebauten Videokameras und Videoregistratoren bekommenen Daten auf. Die Daten haben Dimension N×M×C×F, wo N die Zahl der Pixels in der Bildausschnittzeile ist; M ist die Zahl der Pixels in der Bildausschnittkolonne; C ist die Bedeutung der Farbentiefe; F ist die Zahl der Einzelbilder in der Sekunde. Die Analyse der Daten wird nach der farbigen Videodarstellung gemacht, in der das Vorhandensein der Straßenverkehrszeichen festgestellt wird, und im Falle ihres Auffindens ihre Erkennung durchgeführt wird. Die Realisierung des solchen Algorithmus ist in Form der Blockschaltung auf der Zeichnung 1 dargestellt.
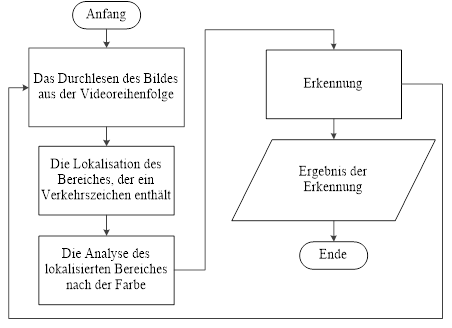
Zeichnung 1. Die Blockschaltung des Suche-und-Erkennungsalgorithmus von Verkehrszeichen nach der Videoreihenfolge
Der auf der Zeichnung 1 dargestellte Suche-und-Erkennungsalgorithmus von Verkehrszeichen wird in einigen Etappen realisiert.
In der ersten Etappe wird die Teilung der Videoreihenfolge in die Bilderfolgen ausgeführt, die ein Bild im Farbenraum RGB darstellen.
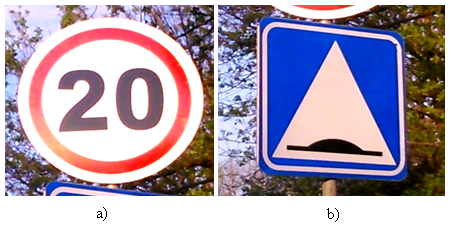
Auf dem zweiten Teilschritt wird für die Qualitätsverbesserung der nachfolgenden Algorithmusarbeit die vorläufige Bildbearbeitung eingeführt. Dabei wird eine Versteilung der Gradation ausgeführt und für die Verminderung der mit Lärm verbundenen Funktionsstörungen eine Medianfilterung verwendet [1]. Das Beispiel der Ausführung dieser Arbeit ist auf der Zeichnung 2 für zwei verschiedene Testvideoreihenfolgen dargestellt.
In der dritten Etappe wird die Lokalisation der Objekte (der Verkehrszeichen) nach den geometrischen Merkmalen ausgeführt. Für die Ausführung dieser Aufgabe wird Binarisierung des bekommenen Bildes und die Bestimmung der Grenzen von Objekten durch Detektor Kanni durchgeführt. Danach werden diese aus dem Bild ausgeschnitten und weiterhin der Reihe nach bearbeitet.

Zeichnung 2. Das Ergebnis des Erhaltens von einem Video-Einzelbild aus der Videoreihenfolge mit der nachfolgenden Bearbeitung: a) — Videoreihenfolge 1; b) –Videoreihenfolge 2
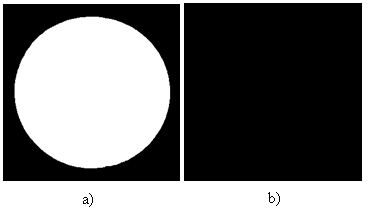
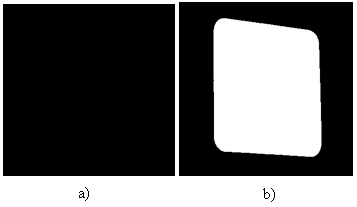
Es sei bemerkt, dass bei der Lokalisation des das Objekt enthaltenden Bereiches werden die zusätzlichen Beschränkungen eingeführt. Diese können auf der Fläche des bekommenen Bereiches basieren. Das ermöglicht die Verringerung der Zahl der zu bearbeitenden Objekte, da die Erkennung der äußerst kleinen Bereiche kompliziert und in einigen Fällen ein unlösbares Problem ist [2]. Die Bestimmung des rechteckigen das Objekt enthaltenden Bereiches basiert auf der Erkennung der morphometrischen Merkmale, die sich auf den Begriffen der Festkörpermechanik gründen, und zwar die Bestimmung des Massenmittelpunktes von Objekten und die Kreisdurchmesser, in die die Objekte eingeschrieben sein können. Auf der Zeichnung 3 ist das Ergebnis der Lokalisation des interessierenden Bereiches dargestellt. Bei der visuellen Einschätzung kann man bestätigen, dass diese Bereiche die Straßenverkehrszeichen enthalten.
Zeichnung 3. Die lokalisierten Interessenbereiche: a) — das erste Objekt; b) — das zweite Objekt
Auf dem vierten Schritt führen wir die Bestimmung der Merkmale von den gewählten Objekten aus. Die enthalten: die Übereinstimmungen der Farben der bekommenen Objekte mit den Farben der Verkehrszeichen (die Verkehrszeichen haben die rote, blaue, weiße, gelbe, orange, grüne Farbe); die Bestimmung der Objektform (die Verkehrszeichen haben runde, dreieckige, quadratische, rhombische und rechteckige Form). Die Bestimmung der dominierenden Farbe auf dem lokalisierten Bereich geschieht durch Vergleich jedes Farbenkanals RGB untereinander und der Übereinstimmung mit den Schwellenbedeutungen. Dabei entsteht Binarisierung des vorliegenden Bereiches, die das Vorhandensein einer bestimmten Zahl von Pixel der aufgegebenen Farbe auf dem Bild aufgrund der Prinzipien der Computerlogik zu erkennen lässt [3]. In diesem Fall ist das wesentliche Vorherrschen der Verkehrszeichenfarben von besonderem Interesse. Für eine qualitätsgerechte Behandlung ist es erforderlich, die zusätzlichen Arbeitsgänge durchzuführen; solche wie die Segmentation und die Bearbeitung der geschlossenen Strukturen, die Entfernung der kleinen Elemente. Die Ergebnisse der Ausführung aller notwendigen Operationen sind auf der Zeichnung 4 für den roten Kanal und auf der Zeichnung 5 für den blauen Kanal für zwei Objekte vorgeführt.
Zeichnung 4. Ergebnisse der morphologischen Bearbeitung des roten Kanals: a) — das erste Objekt; b) — das zweite Objekt
Zeichnung 5. Die Ergebnisse der morphologischen Bearbeitung des blauen Kanals: a) — das erste Objekt; b) — das zweite Objekt
Die Erkennung der geometrischen Parameter des bekommenen binären Bildes geschieht ebenso aufgrund der Erkennung von morphometrischen Merkmalen. Nachdem man den Koeffizient der Form bestimmt und ihn mit dem Kontrollwert verglichen hat, kann man über die Formen und über die Klasse des Objektes, zu denen er gehört, Schlussfolgerungen ziehen. Ein solcher Koeffizient ist der Füllfaktor, der durch das Verhältnis der Fläche des Objektes zur Fläche des ihn beschränkenden Rechteckes bestimmt wird [5]. Selbstverständlich wird solcher Koeffizient für das Rechteck (und für das Quadrat als Sonderfall des Rechteckes) gleich 1 sein. Nachdem man einfache Berechnungen gemacht hat, kann man den Koeffizient für den Kreis bekommen, gehend von der Fläche des beschreibenden ihn Quadrates aus, dadurch ergibt sich folgende Ausdruck (1).
 (1)
(1)
Wo S — die Fläche; R — der Radius des Kreises.
Bei den Berechnungen des Füllfaktors für reale oder simulierte Objekte, können sich seine Bedeutungen von Rechenbedeutungen unterscheiden. Das hängt von den Fehlern der Diskretisierung, den Entstellungen der Form und anderen Aspekten ab. Das Prinzip des Vergleiches des bekommenen Koeffizienten mit seiner Rechenbedeutung im Rahmen der Spanne der Abweichung der Berechnung erlaubt es, die Form des Zeichens genau zu bestimmen.
In der fünften Etappe wird die Analyse der bekommenen Daten ausgeführt sowie die Bestimmung der Gruppe, zu der das Objekt gehört, und zwar: die Verbotszeichen, die Anordnungszeichen, die Zeichen der besonderen Anordnungen oder das Objekt ist kein Zeichen des Straßenverkehrs. Der Erkennungsprozess ist auch auf den Prinzipien der Computerlogik gegründet, das Ergebnis der Erkennung hängt von der Korrelation der Merkmale des Objektes ab, solcher wie die Farbe und die geometrische Form, mit den geeichten Bedeutungen [4], und im Falle ihrer Nichtübereinstimmungen, wird es angesehen, dass das Objekt kein Zeichen des Straßenverkehrs ist. Das Beispiel der Genauigkeit der Erkennung von Verkehrszeichen ist in der Tabelle 1 dargestellt.
Tabelle 1
Ergebnisse der Erkennung von Verkehrszeichen nach der Videoreihenfolge.
|
Die Nummer des Clips |
Die Gesamtzahl der Zeichen in der Videoreihenfolge |
Die Zahl richtig bestimmter Zeichen; |
Die Genauigkeit der Erkennung von Verkehrszeichen; % |
|
1 |
2 |
2 |
100 |
|
2 |
2 |
1 |
50 |
|
3 |
1 |
1 |
100 |
|
4 |
9 |
8 |
89 |
|
Insgesamt |
14 |
10 |
86 |
Die Ergebnisse der Tabelle 1 sind auf der Folge der Testreihenfolgen bekommen. Für die Bestimmung der Arbeit des Algorithmus wurden 4 bekommene in sonniges, klares Wetter Testvideoreihenfolgen verwendet. Die Testdaten stellen die Videodarstellung von der Scharfzeichnung 1980×720 mit der Frequenz 30 Bilder pro Sekunde, verschlüsselt mit der Hilfe von Codec x264 (die Scharfzeichnung mp4) dar. Der Algorithmus ist im Bereich Matlab 2014 unter der Verwendung der m-Sprache des Programmierens realisiert.
Die wesentlichen Ergebnisse lassen sich in folgenden Thesen zusammenfassen: In der Arbeit ist das Suche-und-Erkennungsalgorithmus von Verkehrszeichen nach der Videoreihenfolge dargestellt, ebenso sind die Ergebnisse seiner Arbeit in verschiedenen Etappen beleuchtet. Der dargestellte Algorithmus erfüllt vollständig das aufgegebene Ziel nach der Suche, der weiteren Lokalisation und der Erkennung des bekommenen Bereiches mit der Bestimmung der Gruppe von Straßenverkehrszeichen, zu der das Objekt gehört.
References:
1. Woronin W. W., Martschyk W. I., Scherstobitow А. I., Semenischtschew E. A.. Metody zifrowoi obrabotki signalow dla reschenija prikladnych sadatsch. Моnografija pod red. W. I. Martschyk М.: Radiotechnika, 2012. 128 s..
2. Gonsales R, Woods R. Zifrowaja obrabotka isobrayhenij. М.: Теchnosphera, 2005 1072 s.
3. Gonsales R, Woods R. Zifrowaja obrabotka isobrazhenij w srede Matlab. М.: Теchnosphera,2006. 59 c
4. GOST Р 52290–2004 Теchnitscheskije sredstwa оrganisazii dorozhnogo dwizhenija. Snaki dorozhnye.
5. Prett W. Zifrowaja obrabotka isobrayhenij. W dwych tomach. М.: Мir, 1982. 790s.
