Введение
Движение автомобиля по криволинейной траектории — один из самых сложных и опасных элементов дорожного движения. В отличие от езды по прямой, где основные силы направлены вдоль продольной оси транспортного средства, в повороте на автомобиль начинает действовать сложная система векторов сил (рис. 1). Эти силы стремятся сместить машину с заданной траектории, нарушить её устойчивость и вызвать повышенный износ ключевых узлов.
![Силы, действующие на автомобиль на повороте [1]](https://articles-static-cdn.moluch.org/articles/j/137229/images/137229-1.png)
Рис. 1. Силы, действующие на автомобиль на повороте [1]
Понимание динамики автомобиля на повороте необходимо не только инженерам-конструкторам и строителям дорог, но и практикующим водителям. Рост скоростей современных автомобилей и плотности транспортных потоков требует детального научного подхода к анализу устойчивости и управляемости машин в условиях криволинейного движения.
1. Геометрия криволинейных участков дорог
Конструирование участков дорог, предполагающих изменение направления движения, базируется на строгих математических расчетах [2]. Геометрия поворота определяет, как именно автомобиль будет переходить из стабильного прямолинейного состояния в криволинейное.
1.1. Окружность как базовый элемент
Исторически самым простым способом организации поворота являлось сопряжение двух прямых участков дорог с помощью дуги окружности постоянного радиуса (постоянной кривизны, R= const). Однако с точки зрения динамики такое решение обладает существенным недостатком: при переходе с прямой линии (где радиус кривизны стремится к бесконечности) на дугу окружности (где радиус мгновенно становится конечным) автомобиль испытывает динамический удар. Водитель физически не способен повернуть управляемые колеса мгновенно на требуемый угол. Как результат, в точке сопряжения возникает резкий скачок центробежной силы, который может спровоцировать мгновенную потерю сцепления шин с покрытием.
1.2. Теория переходных кривых
Чтобы сгладить этот переход, в современном дорожном строительстве применяются переходные кривые [2, 3]. Их главная задача — обеспечить плавное, постепенное уменьшение радиуса кривизны от бесконечности до радиуса основной окружности поворота.
Основной переходной кривой является клотоида (спираль Корню) (рис. 2). Математическое уравнение клотоиды задает прямую линейную зависимость между длиной пройденного пути



где

![Клотоида (спираль Корню) [3]](https://articles-static-cdn.moluch.org/articles/j/137229/images/137229-6.jpeg)
Рис. 2. Клотоида (спираль Корню) [3]
Применение клотоиды дает следующие преимущества:
— Кинематическое соответствие: водитель поворачивает рулевое колесо с постоянной угловой скоростью, что соответствует естественной моторике человека.
— Динамическая плавность: центробежная сила нарастает пропорционально времени, позволяя элементам подвески плавно сжиматься, распределяя вес машины.
— Организация виража: на участке переходной кривой дорожное полотно постепенно меняет свой поперечный профиль с двухскатного на односкатный (вираж), что компенсирует действие боковых сил.
В ряде случаев, например, на железнодорожном транспорте или при проектировании многоуровневых автомобильных развязок в условиях стесненной застройки, могут применяться другие типы переходных кривых: кубическая парабола или лемниската Бернулли. Лемниската, в частности, эффективна там, где требуется очень быстрое уменьшение радиуса на входе и последующее его увеличение на выходе из петли развязки.
![Лемниската Бернулли [4]](https://articles-static-cdn.moluch.org/articles/j/137229/images/137229-7.png)
Рис. 3. Лемниската Бернулли [4]
2. Физика криволинейного движения и силы инерции
В основе динамики поворота лежат фундаментальные законы классической механики Ньютона. Как только транспортное средство начинает изменять вектор своей скорости, возникает ускорение, направленное к центру кривизны траектории (центростремительное или нормальное ускорение) (рис. 4).
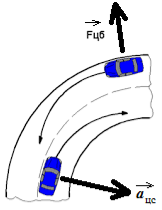
Рис. 4. Центростремительное ускорение и центробежная сила
2.1. Расчет центробежной силы
В неинерциальной системе отсчета, связанной с автомобилем, на него действует виртуальная (псевдосила) центробежная сила Fцб, стремящаяся сместить массу машины наружу от центра поворота (рис. 4). Виртуальной или псевдосилой центробежная сила является в силу того, что она не связана с взаимодействием тел (согласно определению), а с инерцией тела. Она является одной из так называемых сил инерции. Модуль этой силы:

где m — полная масса автомобиля (кг); v — линейная скорость движения (м/с); R — текущий радиус кривизны траектории (м).
Анализ формулы показывает, что центробежная сила находится в прямо пропорциональной зависимости от квадрата скорости или, другими словами. квадратичной зависимости от модуля скорости. Это фундаментальный фактор риска: увеличение скорости движения, например, в 2 раза приводит к четырехкратному росту силы, пытающейся «сбросить» автомобиль с дороги. Увеличение массы автомобиля (например, при полной загрузке) увеличивает силу линейно, однако существенно ухудшает общую управляемость за счет смещения центра тяжести.
2.2. Поперечное (боковое) ускорение
Пассажиры и водитель внутри салона воспринимают центробежную силу через боковое ускорение a цс :

Это ускорение и есть упомянутое выше центростремительное или нормальное ускорение (рис. 4).
При проектировании дорог общего пользования инженеры стремятся ограничить величину бокового ускорения значениями 1.5÷2.0 м/с 2 . Данный порог обусловлен физиологическими особенностями человеческого организма. При превышении этих значений у людей возникает чувство выраженного дискомфорта, нарушается координация, а при длительном воздействии развивается укачивание и утомляемость. В автоспорте, за счет применения специальных анатомических кресел и спортивной подвески, гонщики способны выдерживать боковые ускорения до 40÷50 м/с 2 (4 g ÷5 g ).
3. Взаимодействие элементов трансмиссии и ходовой части
Поворот автомобиля накладывает специфические требования на работу его механических узлов. Колеса, расположенные на разных сторонах одной оси, в повороте оказываются в неравных условиях. Например, они вынуждены идти по кривым различного радиуса (внешний больше внутреннего) (рис. 5).
![Разный радиус кривизны траектории для колес на повороте [3]](https://articles-static-cdn.moluch.org/articles/j/137229/images/137229-11.png)
Рис. 5. Разный радиус кривизны траектории для колес на повороте [3]
3.1. Дифференциал и рулевая трапеция
При движении по дуге внешние колеса автомобиля описывают больший радиус (рис. 5) и, следовательно, проходят более длинный путь, чем внутренние колеса. Если бы колеса ведущей оси были жестко связаны между собой единым валом, они были бы вынуждены вращаться с одинаковой угловой скоростью. Это привело бы к неизбежному проскальзыванию одного или обоих колес относительно асфальта (что приводило бы. Например, к повышенному износу протектора шин).
Для устранения этого эффекта применяется дифференциал — планетарный механизм, распределяющий крутящий момент между полуосями и позволяющий им вращаться с разными угловыми скоростями (рис. 6).
![Дифференциал автомобиля [5]](https://articles-static-cdn.moluch.org/articles/j/137229/images/137229-12.png)
Рис. 6. Дифференциал автомобиля [5]
Кинематическое соотношение угловых скоростей колес:

где

Однако стандартный свободный дифференциал имеет серьезный недостаток в повороте. Под действием центробежной силы автомобиль кренится, разгружая внутреннее колесо. Свободный дифференциал передает одинаковый крутящий момент на оба колеса, но величина этого момента ограничена колесом, имеющим худшее сцепление. Если внутреннее колесо начнет буксовать, внешнее колесо также потеряет тягу. Для борьбы с этим в современных автомобилях применяются системы электронной имитации блокировок (подтормаживание буксующего колеса) или дифференциалы повышенного трения (LSD).
Еще одним из устройств, компенсирующих негативное влияние движения внешнего и внутреннего колеса по разным радиусам, является рулевая трапеция (рис. 7). Благодаря этому, относительно простому устройству, колеса, благодаря которым совершается маневр, поворачиваются под разным углом к направлению движения. Внутреннее колеса поворачивается на угол больший, чем внешнее (рис. 7).
![Рулевая трапеция и поворот колес при маневре [6]](https://articles-static-cdn.moluch.org/articles/j/137229/images/137229-15.png)
Рис. 7. Рулевая трапеция и поворот колес при маневре [6]
3.2. Деформация и увод автомобильных шин
Шина — единственный элемент, связывающий автомобиль с дорогой. Пятно контакта шины с покрытием в повороте подвергается экстремальным боковым нагрузкам.
Под действием боковой силы происходит эластичная деформация протектора и боковины шины. Этот феномен называется боковым уводом шины. Вектор фактического движения колеса отклоняется от направления его геометрической плоскости вращения на некоторый угол

![Боковой увод шины [7]](https://articles-static-cdn.moluch.org/articles/j/137229/images/137229-17.png)
Рис. 8. Боковой увод шины [7]
Если угол увода передней оси превышает угол увода задней оси, автомобиль проявляет тенденцию к недостаточной поворачиваемости (стремится распрямить траекторию). Если наоборот — к избыточной поворачиваемости (стремится закрутиться внутрь поворота).
Боковые нагрузки вызывают сильное термическое и механическое напряжение в плечевой зоне протектора шины. При регулярном агрессивном прохождении поворотов внешняя кромка беговой дорожки изнашивается неравномерно и в несколько раз быстрее, существенно сокращая общий ресурс покрышки.
4. Безопасность движения и критические режимы
Безопасность автомобиля в повороте жестко лимитирована физическим законом сцепления. Основное правило устойчивости требует, чтобы сдвигающая центробежная сила не превышала предельную силу трения покоя в пятне контакта шин.
4.1. Условие удержания на траектории
В самом упрощенном виде (без учета наклона дороги и перераспределения масс) математическое условие отсутствия заноса выглядит так:

где g=9.81 м/с 2 — ускорение свободного падения; μ — коэффициент сцепления шины с дорожным покрытием.
Коэффициент

— сухой качественный асфальт — μ ≈0.7÷0.8;
— мокрый асфальт — μ ≈0.4÷0.5;
— укатанный снег — μ ≈0.2;
— обледенелое покрытие — μ ≈0.1.
Из (5) можно, например, видеть, что если коэффициент сцепления упал в 8 раз (переход с сухого асфальта на лед), то для сохранения управляемости квадрат скорости должен уменьшиться также в 8 раз, что требует снижения линейной скорости почти в 3 раза.
4.2. Снос передней оси и занос задней оси
При нарушении баланса сил автомобиль может перейти в один из критических режимов (рис. 9).
![Критические режимы при повороте автомобиля [8]](https://articles-static-cdn.moluch.org/articles/j/137229/images/137229-20.jpeg)
Рис. 9. Критические режимы при повороте автомобиля [8]
1. Снос передней оси (недостаточная поворачиваемость): сила инерции превышает силу сцепления управляемых колес. Автомобиль перестает реагировать на поворот руля и продолжает двигаться по касательной к траектории (прямо). Данный режим опасен для рядового водителя, так как инстинктивное желание еще сильнее довернуть руль лишь ухудшает сцепление шин.
2. Занос задней оси (избыточная поворачиваемость): скольжение со срывом колес задней оси. Задняя часть автомобиля стремится обогнать переднюю. Этот режим может быть вызван резким торможением или избытком газа на заднем приводе. Требует быстрой и точной корректировки рулем в сторону заноса и дозированной работы педалью акселератора.
4.3. Опрокидывание транспортного средства
Для автомобилей с высоким центром тяжести (внедорожники, грузовики, автобусы) существует риск опрокидывания до момента наступления скольжения колес (рис. 10).
![Действие сил на автомобиль при опрокидывании после потери боковой устойчивости [1]](https://articles-static-cdn.moluch.org/articles/j/137229/images/137229-21.png)
Рис. 10. Действие сил на автомобиль при опрокидывании после потери боковой устойчивости [1]
Опрокидывание происходит, когда результирующий вектор центробежной силы и силы тяжести выходит за пределы колеи автомобиля. Предельная скорость по условию опрокидывания рассчитывается по формуле:
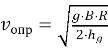
где B — ширина колеи автомобиля, а h g — высота расположения центра тяжести (плечо пары сил на рис. 10), R — радиус поворота. Соответственно, чем выше расположен центр масс автомобиля, тем ниже будет безопасная скорость прохождения изгиба дороги.
5. Современные электронные системы стабилизации
В современном автомобилестроении механические ограничения частично компенсируются активными электронными системами безопасности. Ключевой из них является система динамической стабилизации (ESC / ESP).
ESP непрерывно обрабатывает сигналы с множества датчиков: датчика угла поворота руля, датчиков угловой скорости колес, датчика продольного и поперечного ускорения (акселерометра) и датчика рыскания (угловой скорости вокруг вертикальной оси).
Если электроника обнаруживает расхождение между реальной траекторией движения автомобиля и направлением, заданным водителем с помощью руля, она вмешивается в динамику:
— При фиксации сноса передней оси система автоматически подтормаживает внутреннее заднее колесо. Это создает искусственный разворачивающий момент, помогающий «заправить» переднюю часть машины в поворот.
— При фиксации заноса задней оси подтормаживается внешнее переднее колесо, гасящее избыточное вращение автомобиля вокруг своей оси.
— При необходимости система принудительно ограничивает подачу топлива, снижая крутящий момент двигателя, независимо от положения педали газа.
Несмотря на высокую эффективность, важно понимать, что электронные ассистенты лишь помогают водителю эффективно использовать имеющийся запас сцепления шин, но они физически не способны обойти фундаментальные законы трения, если скорость входа в поворот была завышена сверх критической отметки.
Заключение
Динамика автомобиля на повороте представляет собой многофакторный процесс, где геометрия дороги, физические законы и конструкция автомобиля связаны в единую систему. Безопасное и эффективное управление транспортным средством требует строгого учета всех описанных факторов.
Проектирование дорог с использованием переходных кривых (клотоид) и правильных виражей существенно сглаживает пиковые нагрузки на автомобиль. Однако ключевым звеном в управлении безопасностью остается водитель. Понимание квадратичной зависимости центробежной силы от скорости и изменчивости коэффициента сцепления шин с дорогой позволяет минимизировать риски возникновения аварийных ситуаций, продлить ресурс узлов трансмиссии и ходовой части, а также обеспечить максимальный комфорт и безопасность для всех участников дорожного движения.
Литература:
- Власов Х. В., Евтюхин И. Е., Серебряков Ю. Ф. Вождение автомобиля в сложных условиях. (Издание второе, дополненное). Военное издательство Министерства обороны СССР, Москва, 1964 г.
- Кармаджян А. Е., Кириллов А. М. Кривые в дорожной отрасли // Молодой ученый. — 2026. — № 14(617). — С. 22–28. — EDN DJAKCG.
- Математическая составляющая / Н. Н. Андреев, С. П. Коновалов, Н. М. Панюнин и др.; ред.-сост.: Н. Н. Андреев и др. — М.: Фонд «Математические этюды», 2015. — 352 с. — ISBN 978–5–906825–00–1.
- https://img.delovoy-saransk.ru/stories/users/3660/klewernyjlist.jpg, http://mathemlib.ru/mathenc/item/f00/s00/e0000421/index.shtml
- https://personaspb.com/klientam/poleznye-stati/chto-takoe-differencial-v-avtomobile-princip-ego-raboty.html
- https://www.kolesa.ru/article/pochemu-kolesa-pri-povorote-rulya-povorachivayutsya-na-raznyj-ugol
- https://caddy-club.in.ua/threads/Силовой-увод-шин.1510/
- https://www.drive2.ru/b/578987705975702028/