Программно-технический комплекс автоматизированной системы управления технологическим процессом является основным элементом управления исполнительными механизмами АЭС.
Для поддержания требуемых параметров и безаварийной, устойчивой работы энергоблоков АЭС необходимо исключить (свести к минимуму) отказы элементов управления.
В зависимости от функционального назначения электроприводной арматуры для реализации функции управления исполнительными механизмами существует необходимость использования асинхронных электроприводов с частотным управлением.
В процессе эксплуатации важным аспектом функционального состояния электроприводной арматуры является время работы в условиях высоких температур и давления, а также поддержание водно-химического баланса, непревышение определенной величины пусковых токов запорной арматуры и других устройств.
По статистике, по меньшей мере 15 % от общего количества остановов энергоблоков так или иначе связано с изменением технического состояния электроприводной арматуры [1].
Асинхронные электродвигатели 10 и 0,4 кВ с короткозамкнутым ротором широко применяются для привода технологических механизмов собственных нужд электрических станций. Применение асинхронных электродвигателей обусловлено их высокой надежностью, дешевизной, простотой конструкции, возможностью большой перегрузки, простотой пуска и возможностью автоматизации.
При эксплуатации электродвигателей на шинах собственных нужд энергоблока должно поддерживаться напряжение 100…105 % от номинального, частота питающей сети может меняться в пределах ±2,5 % (1,25 Гц). При необходимости допускается работа электродвигателей при напряжении от 90 до 110 % от номинального с сохранением их номинальной мощности. Номинальная мощность электродвигателей должна сохраняться при одновременном отклонении напряжения на 10 % и частоты на 2,5 % (1,25 Гц) от номинальных значений при условии, что при работе с пониженным напряжением и повышенной частотой сумма абсолютных значений отклонений напряжения и частоты не превышает 10 %.
Электродвигатели с короткозамкнутыми роторами разрешается пускать из холодного состояния два раза подряд, из горячего — один раз, если заводской документацией не допускается большее количество пусков. Последующие пуски разрешаются после охлаждения электродвигателя до температуры окружающей среды.
Электродвигатели изготавливают различной мощности — от нескольких ватт до нескольких тысяч киловатт. Несмотря на большое разнообразие асинхронных электродвигателей по мощности, климатическому исполнению и способам охлаждения, все они, в принципе, имеют одну и ту же конструкцию (рис. 1). Основные конструктивные элементы асинхронных электродвигателей: клеммная колодка, коробка ввода электрокабеля, обмотка статора, ротор короткозамкнутый, крышка с подшипником, вал.
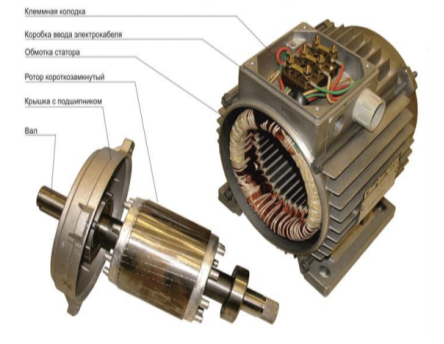
Рис. 1. Конструкция электродвигателя
Принцип работы асинхронного электродвигателя основан на использовании закона электромагнитной индукции, сущность которого заключается в том, что при включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле статора, частота вращения которого n 1 определяется выражением:
𝑛 1 = 𝑓 1 ∙60/𝑝 (об/мин),
где f 1 — частота сети переменного тока, Гц,
𝑝 — число пар полюсов обмотки статора.
Вращающееся магнитное поле статора (полюсы N 1 и S 1 ) сцепляется как с обмоткой статора, так и с обмоткой ротора и наводит в них ЭДС. ЭДС обмотки статора, являясь ЭДС самоиндукции, действует встречно приложенному к обмотке напряжению и ограничивает величину тока в обмотке статора. Обмотка ротора замкнута, поэтому ЭДС ротора создает в стержнях обмотки ротора токи, а следовательно, и магнитное поле. Взаимодействие магнитного поля ротора и магнитного поля статора создает на роторе электромагнитные силы F ЭМ , направление которых определяется по правилу левой руки. Электромагнитные силы F ЭМ стремятся повернуть ротор в направлении вращения магнитного поля статора. Совокупность сил F ЭМ создает на роторе электромагнитный момент М , который вращает ротор с частотой n 2 (рис. 2).
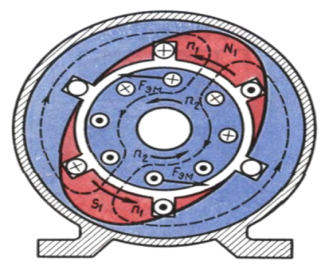
Рис. 2. Распределение электромагнитных полей в электродвигателе: F эм — электромагнитные силы; N 1 и S 1 — полюсы статора; n 1 —частота вращения магнитного поля статора; n 2 — частота вращения магнитного поля ротора
Частота вращения ротора n 2 называется асинхронной, так как n 2 < n 1 . Величина, характеризующая разность частот ротора и магнитного поля статора, называется скольжением и определяется следующим образом:
S = ( n 1 − n 2 / n 1 ) ∙ 100 %, откуда n 2 = n 1 (1 – S ),
где:
S — скольжение, n 1 — скорость вращения магнитного поля статора, n 2 — скорость вращения ротора. Величина скольжения асинхронных электродвигателей — от 1 до 8 % [2].
Первое, что влияет на выбор частотного преобразователя, — сфера применения. Все преобразователи частоты осуществляют плавное регулирование скорости и снижение пусковых токов. При этом общепромышленные модели имеют унифицированные возможности в зависимости от научно-технического потенциала производителя, а для решения конкретных инженерных задач разрабатывают специализированный функционал.
Характеристики преобразователя частоты и степень необходимой защиты корпуса должны соответствовать условиям эксплуатации: температуре окружающей среды, уровню влажности, высоте над уровнем моря и сейсмичности района. Важен и способ монтажа: на стену, напольное исполнение или в шкафу.
Асинхронные электродвигатели применяются повсеместно. Однако их эффективность снижается из-за отсутствия регулирования скорости и ударных нагрузок на механизмы. Пусковые токи могут превышать номинальное значение в 6–8 раз. Исправить недостатки и повлиять на производительность позволяет частотное регулирование. Чаще всего насосы, вентиляторы и компрессоры не работают на полную проектную мощность.
Частотный преобразователь с высокой точностью подстраивает скорость привода под требуемую в данный момент нагрузку: напор и расход легко контролировать за счет регулирования частоты и момента. Пусковой ток привода значительно ниже, чем у двигателя с прямым пуском или пуском по схеме «звезда — треугольник». Плавный пуск снижает пусковые токи и нагрузку на сеть, обеспечивая корректную работу запорной арматуры и других устройств [3].
Правительство утвердило комплексную государственную программу «Энергосбережение и повышение энергетической эффективности», согласно которой будет необходимо перейти на двигатели класса IE3 [4, 5]. Миллионы асинхронных приводов старого поколения заменить нереально, поэтому нужна альтернатива. Самое экономически целесообразное решение — применение систем с частотно-регулируемыми приводами. Система с частотно-регулируемыми приводами функционирует в автоматическом режиме, не требуя постоянного присутствия обслуживающего персонала. На АЭС отметили значительный экономический эффект за счет экономии электроэнергии и увеличения срока службы оборудования.
Основные причины использования частотно-управляемых асинхронных электроприводов:
— снижение температурных режимов работы электроприводов;
— уменьшение сечения жил кабеля, питающего электроприводную арматуру;
— снижение вероятности отказов в результате возгораний;
— возможность автоматизации управления, плавных пусков и остановов.
Литература:
- Технический отчет ЭМТД 66-028-09Д. Результаты диагностического обследования ЭПА Нововоронежской АЭС ЭБ № 3, 4, 5. 2009. 177 с.
- Электродвигатели асинхронные трехфазные общепромышленного назначения серий 4А, 5А, 6А, АИ габаритов 80-355. Руководство по эксплуатации. ВАКИ.520205.002 РЭ.
- Асинхронные двигатели серии 4А : справочник. М., 1982.
- Постановление Правительства Российской Федерации от 09.09.2023 № 1473 «Об утверждении комплексной государственной программы Российской Федерации «Энергосбережение и повышение энергетической эффективности».
- Правительство утвердило комплексную государственную программу «Энергосбережение и повышение энергетической эффективности». — Текст : электронный // Правительство Российской Федерации : [сайт]. — URL: http://government.ru/docs/49471/ (дата обращения: 18.05.2025).

