В статье автор исследует новую форму винта для беспилотного летательного аппарата, которая будет способствовать увеличению тяги и улучшению лётных характеристик.
Ключевые слова: тороидальный винт, тяга винта, моделирование, траектория полёта
В 2022 году исследователи из Массачусетского технологического института предложили концепцию тороидального винта, основываясь на том, что конструкция закрытой формы уменьшает и контролирует эффекты сопротивления закручивающихся воздушных каналов (т. е. вихрей), создаваемых на концах лопастей, и повышает общую жёсткость воздушного винта. Таким образом, акустическая сигнатура винта в разы снижается, не влияя на его характеристики [1]. Эксперименты по акустическому шуму уже были проведены, где винты тороидальной формы показали лучшие результаты в сравнении с винтами классической формы. В этой статье рассмотрим лётные характеристики, используя винт новой формы.
Моделирование. Винт был смоделирован в программной среде «SOLIDWORKS», используя метод соединения множества смещённых плоскостей. При построении использовались следующие параметры:
— диагональ — 5 дюймов;
— шаг — 2.5 дюйма.
На рис. 1 можно увидеть полученную модель винта.
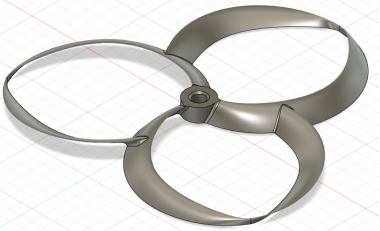
Рис. 1. Модель винта
Технология 3D-печати. С помощью технологии аддитивной печати винт был физически реализован. При этом были опробованы различные материалы. В таблице 1 приведены сравнительные характеристики винтов.
Таблица 1
Сравнение винтов из различных материалов
|
Тороидальная форма винтов № 1 | ||
|
Характеристики |
Параметры |
|
|
Диаметр |
5 дюймов | |
|
Масса винта |
4.95 граммов | |
|
Шаг |
2.5 дюйма | |
|
Материал |
PLA-пластик | |
|
Тороидальная форма винтов № 2 | ||
|
Характеристики |
Параметры |
|
|
Диаметр |
5 дюймов | |
|
Масса винта |
4.80 граммов | |
|
Шаг |
2.5 дюйма | |
|
Материал |
PETG Carbon Fiber | |


Винты оригинальной формы созданы с помощью технологии литья под давлением. Такие винты лёгкие и прочные. Винты тороидальной формы были созданы с помощью технологии аддитивной печати из двух разных видов пластика, но винт получался тонким и гибким. По этой причине было произведено горизонтальное расширение модели, что увеличило массу винта, но в значительной степени повысило прочность. Для достижения лучших параметров винт печатался толщиной слоя 0.1 мм.
Винты из PLA-пластика обладают определённой гибкостью и жёсткостью, но это не даёт устойчивости к механическим повреждениям. При работе с квадрокоптером внутри винтов со временем образовывались микротрещины и небольшие сколы на лопастях [2]. Поэтому был использован пластик PETG Carbon Fiber. Добавление углеродных волокон в пластик, усиливает его механические свойства, такие как прочность и жёсткость, позволяя выдерживать большие нагрузки. К тому же этот пластик лучше подвержен механической обработке, за счёт чего края и основная часть винта становятся более гладкими.
Лабораторные испытания по исследованию тяги винта. Это исследование позволяет проанализировать возможную тягу винта новой формы, сравнить с аналогами полученные значения, а также рассчитать время пребывания беспилотника в воздухе на одном заряде аккумулятора [3].
Для проведения эксперимента на 3D-принтере была распечатана установка из PLA-пластика. Данная установка представляет собой рычаг с соотношением сторон 1:1, на одну сторону, которого прикладывается сила, создаваемая воздушным винтом, а на противоположной стороне рычага закреплена платформа, которая давит на весы, вследствие чего можно получить значение силы тяги. Установка представлена на рис. 2 [4].

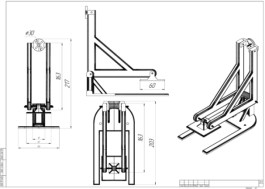
Рис. 2. Установка для проведения эксперимента
Мотор был закреплён на установке, после чего к нему подключили ESC-контроллер и сервотестер. Затем на контроллер с помощью лабораторного источника питания, постепенно подавалось напряжение до тех пор, пока не было достигнуто его максимально возможное значение. Также, с помощью этого эксперимента можно узнать значение силы тока, потребляемое на максимальных оборотах.
В этом эксперименте участвовало 3 винта: винт стандартной формы, созданный с помощью технологии литья; винт трёхлопастной — напечатанный; винт тороидальной формы — напечатанный.
В таблице 2 показаны результаты эксперимента.
Таблица 2
Результаты эксперимента
|
Вид винта |
Фото |
Напряжение (V) |
Тяга (гр) |
Ток (А) |
Вес винта (гр) |
|
Стандарт. литой |
|
14.4 |
178 |
2.2 |
2.1 |
|
Стандарт. напечатанный |
|
183 |
4.1 |
2.9 | |
|
Тороидальный |
|
258 |
4.9 |
4.8 |



Из полученных данных можно сделать вывод, что несмотря на большой вес тороидального винта, в сравнении с двумя другими, значение тяги больше в 1.5 раза, чем у стандартного литого винта. Значение силы тока у тороидального винта получилось в 2.2 раза больше, чем у литого винта стандартной формы, что свидетельствует о его меньшем времени нахождения в полёте.
Для расчёта времени нахождения в полёте при использовании аккумулятора от квадрокоптера «Геоскан Пионер» можно воспользоваться формулой:
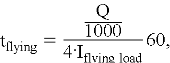
где

Q — ёмкость аккумуляторной батареи, в мА*ч;

4 — количество моторов квадрокоптера;
1000 — коэффициент для перевода мА*ч в А*ч;
60 — коэффициент для перевода в минуты [5].
Наибольшую продолжительность полёта обеспечивает стандартный литой винт, достигающий времени полёта порядка 9 минут. Для сравнения, стандартный напечатанный винт обеспечивает около 5 минут полёта, а тороидальный винт — примерно 4 минуты. Таким образом, литой винт превосходит тороидальный по данному показателю в 2,2 раза. Следует отметить, что тороидальный винт был изготовлен методом 3D-печати, что потенциально может оказывать влияние на его аэродинамические и механические характеристики, в результате чего он может уступать литым аналогам по ряду параметров [6].
Траектории движения квадрокоптера . Вданной главе будут проведены экспериментальные исследования по анализу траекторий движения квадрокоптера с использованием различного ПО, чтобы убедиться в корректном выполнении задания с модифицированной конструкцией.
Системы захвата и моделирования движения. Влаборатории используется система камер фирмы «Qualisys», показанная на рис. 3, предназначенных для сбора точных данных объекта в движении. Камеры работают по принципу инфракрасного излучения. В каждую камеру встроено кольцо, испускающее ИК-излучение. Система таких камер образует определённую область, и помещённый внутрь этой области, пассивный/активный маркер, который изображён на рис. 4 может быть определён в этом пространстве [7].

Рис. 3. Камера фирмы «Qualisys»

Рис. 4. Маркеры
Полученные данные были переданы в программную среду «Qualisys Track Manager».
Проведение эксперимента. На квадрокоптер было установлено 5 маркеров, что показано на рис. 5, для отслеживания перемещений в пространстве.

Рис. 5. Квадрокоптер с установленными на нем маркерами
Квадрокоптер с защитной рамой представляет собой квадрат, на центр каждой грани которого был установлен маркер, а также по центру устройства. Схематичное расположение маркеров показано на рис. 6. После проведения калибровки системы, были получены значения расстояний между маркерами. Сравнение показало, что длина между реальными значениями и полученными в программе составляет 0,5 см. Это показывает точность используемой системы.
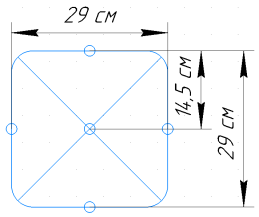
Рис. 6. Схематичное расположение маркеров
Эксперимент заключался в следующем: квадрокоптер взлетал на 1 метр, затем перемещался на 4 метра вперёд и опускался. Для каждого из винтов эксперимент проводился 10 раз. Стрелкой показано направление движения квадрокоптера, кругом обозначено место завершения полёта, что показано на рис. 7.
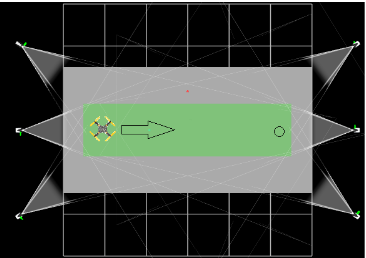
Рис. 7. Расположение квадрокоптера
Результат эксперимента показан на рис. 8. Полученная траектория практически соответствует заданной программе.
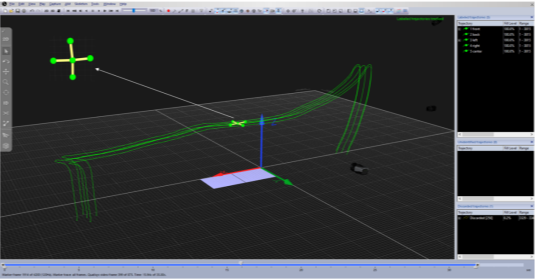
Рис. 8. Результат эксперимента
Для обработки полученных данных использовалась программа «MATLAB». Для каждого из экспериментов были построены полученные траектории и произведено сравнение с «идеальной» траекторией.
На рис. 9 показаны траектории квадрокоптера, на котором закреплены тороидальные винты. Как видно из рисунка во время взлёта отклонения квадрокоптера от точки начала движения чаще всего достигали расстояния до 20 см, а в некоторых случаях и больше. Это связано с тем, что моторы модели 1306 не успевали набрать необходимые обороты из-за увеличенной массы новых винтов и беспилотник смещался в какую-либо сторону, а траектория полёта принимала вид синусоиды.
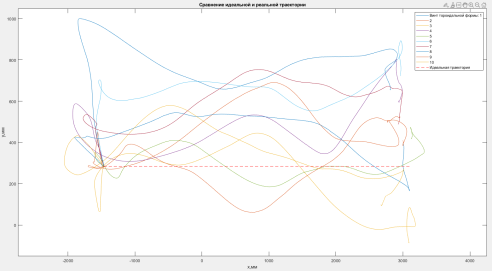
Рис. 9. Сравнение реальной траектории тороидального винта с «идеальной»
Максимальные и минимальные отклонения полёта квадрокоптера с установленными на нём тороидальными винтами отображены в таблице 3.
Таблица 3
Максимальные и минимальные отклонения полёта квадрокоптера с установленными на нём тороидальными винтами
|
№ эксперимента |
Минимальное отклонение на траектории, см |
Максимальное отклонение на траектории, см |
Отклонение от точки завершения полёта, см |
|
1 |
37.4 |
72 |
37 |
|
2 |
1.4 |
79 |
24 |
|
3 |
0.7 |
31 |
37 |
|
4 |
2.4 |
52 |
31 |
|
5 |
0,03 |
19 |
13 |
|
6 |
26.7 |
61 |
44 |
|
7 |
15.5 |
47 |
20 |
|
8 |
12 |
26 |
11 |
|
9 |
10 |
24 |
12 |
|
10 |
12 |
29 |
19 |
Несмотря на допущенные погрешности и влияние конструктивно-технических особенностей, выполнение задания беспилотным аппаратом осталось в пределах установленных допусков.
На рис. 10 представлены графики изменения высоты во время полёта квадрокоптера. Как можно заметить из-за изменённой конфигурации автопилота, где было изменено время проверки моторов, а также установке других винтов, квадрокоптер во время взлёта мог достигать отметки 180 см, однако затем квадрокоптер начинал выполнять поставленное задание и снижался по высоте, чаще всего находясь в диапазоне от 97 см до 110 см.
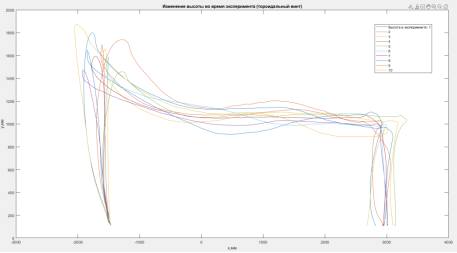
Рис. 10. Анализ значений высоты в эксперименте
На рис. 11 изображены траектории БПЛА с винтом стандартной формы. Во время взлёта квадрокоптер сильно отклоняется влево, во время полёта такая тенденция и сохраняется. Так как в этом эксперименте, использовался беспилотник без изменений, стоит предположить, что присутствует либо ошибка в алгоритме, либо помеха в оборудовании, хотя сама траектория выглядит достаточно линейной.
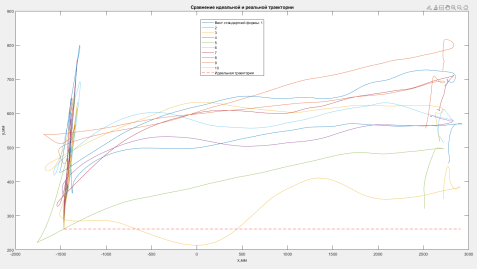
Рис. 11. Сравнение реальной траектории винта стандартной формы с «идеальной»
В таблице 4 отображены максимальные и минимальные отклонения полёта квадрокоптера с установленными на нём винтами стандартной формы.
Таблица 4
Максимальные и минимальные отклонения полёта квадрокоптера с установленными на нём винтами стандартной формы
|
№ эксперимента |
Минимальное отклонение на траектории, см |
Максимальное отклонение на траектории, см |
Отклонение от точки завершения полёта, см |
|
1 |
10.5 |
38 |
19 |
|
2 |
19 |
55.5 |
46.5 |
|
3 |
17 |
39 |
27 |
|
4 |
9.3 |
34 |
33 |
|
5 |
4 |
35 |
6 |
|
6 |
16 |
43 |
25 |
|
7 |
6.7 |
50 |
35 |
|
8 |
17 |
54 |
42 |
|
9 |
25 |
45 |
30 |
|
10 |
0.1 |
37 |
9 |
На рис. 12 представлены графики изменения высоты во время полёта квадрокоптера. Во время взлёта квадрокоптер мог достигать отметки 139 см. Затем квадрокоптер начинал выполнять поставленное задание и снижался по высоте, находясь в диапазоне от 87 см до 94 см, однако заданной высоты полёта в 100 см квадрокоптер не достигает.
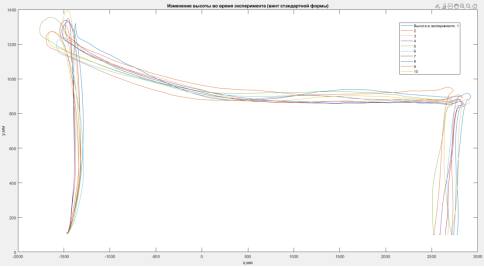
Рис. 12. Анализ значений высоты в эксперименте
Вывод. Проводились лабораторные испытания по исследованию тяги винта. Из данных, полученных после экспериментов, можно сделать вывод, что несмотря на большой вес тороидального винта его значение тяги больше в 1.5 раза, чем у стандартного литого винта. Однако потребление тока у тороидального винта получилось в 2.2 раза больше, чем у литого винта стандартной формы, что свидетельствует о его меньшем времени нахождения в полёте. Если улучшить характеристики тороидального винта, сделав его литым, то можно исключить его недостатки, не потеряв в эффективности.
Было рассчитано время нахождения в полёте при использовании аккумулятора от квадрокоптера «Геоскан Пионер».
Также проводились испытания в лаборатории «Системы захвата и моделирования движений» для исследования траекторий движения квадрокоптера. Для каждого из экспериментов были построены полученные траектории в программной среде «MATLAB» и произведено сравнение с «идеальной» траекторией.
Литература:
- Тороидальные пропеллеры: более тихое будущее для FPV-дронов? [Электронный ресурс]. URL: Toroidal Propellers: A Quieter Future for FPV Drones? — Oscar Liang (дата обращения: 05.02.2025)
- Технический паспорт PLA. [Электронный ресурс]. URL: https://rec3d.ru/wa-data/public/site/themes/easystart/img/Wiki/ispytaniya/TDS %20PLA.pdf. (дата обращения: 19.02.2025)
- С. З. Свердлов. Продолжительность полёта электрического беспилотного вертолёта, 2014. — 2 с.
- Hannah Jansen. Impact of toroidal propeller design on unmanned aerial vehicle acoustic signature and aerodynamic performance. P. 6.
- Калькулятор литий-полимерных аккумуляторов для дронов. [Электронный ресурс]. URL: https://www.translatorscafe.com/unit-converter/ru-RU/calculator/multicopter-lipo-battery/ (дата обращения: 10.04.2025)
- 3D-печать против литья под давлением. [Электронный ресурс]. URL: https://dzen.ru/a/ZFOAuqt8G2j1Eo4C?ysclid=m9psu16pzg812370094. (дата обращения: 19.04.2025)
- Камеры захвата движения. [Электронный ресурс]. URL: https://www.qualisys.com/cameras/miqus/ (дата обращения: 10.04.2025)

