Получены размеры звеньев манипулятора с помощью составленных для данного механизма функций расчета обратной кинематики. Определены исходные данные в системе MATLAB для дальнейшего подбора редуктора (червячного) с использованием метода, базирующегося на матрице Якоби.
Ключевые слова: механизм, степень свободы, программный комплекс, матрица Якоби.
Данный механизм содержит 6 цепей. Каждая цепь состоит из: вертикально ориентированной призматической пары, 2-х сферических шарниров, и соединяющих эти шарниры промежуточных звеньев. Область манипулирования: ± 0,15 м по осям x и у, ± 0,1 м по оси z и ± 20 ° угол поворота по любой оси.
Положение и ориентация выходного звена описывается шестью выходными координатами: координаты x, y, z точки D в неподвижной системе Oxyz задают положение, а углы поворота φx, φy, φz в подвижной системе Dx'y'z' — ориентацию. При этом ориентация самой системы Dx'y'z' считается неизменной, то есть оси x', y' и z' всегда остаются параллельны осям x, y и z.
Для использования данной методики предварительно были подобраны размеры звеньев механизма с использованием функций, которые решают обратную задачу кинематики для одной цепи и для всего механизма. Представим полученную конструкцию на рисунке 1.
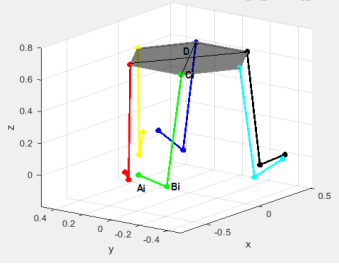
Рис.1. Отрисовка механизма, полученная в результате выполнения созданной программы в MATLAB
Геометрические размеры (м):
– l, длины звеньев (одинаковы для всех цепей):
lAB = 0,2, lBC = 0,7;
– h, пределы перемещения каретки (одинаковы для всех цепей): hmin = 0,6, hmax = 0,8;
– xA, координаты, определяющие положение и ориентацию вертикальной стойки механизма и звена AB:
xA1 = 0,3155, yA1 = — 0,4505, xB2 = 0,3155, yB2 = 0,4505, xA3 = 0,2224, yA3 = 0,4985, xA4 = — 0,5548, yA4 = 0,0479, xA5 = — 0,5548, yA5 = — 0,0479, xA6 = 0,2324, yA6 = — 0,4985, для всех цепей zA = 0,05;
– координаты точек Сi в начальном положении в системе Dx'y'z':
x'C01 = 0,3155, y'C01 = — 0,1821, x'C02 = 0,3155, y'C02 = 0,1821, x'C03 = 0, y'C03 = 0,3643, x'C04 = — 0,3156, y'C04 = 0,1821, x'C05 = — 0,3155, y'C05 = — 0,1821, x'C06 = 0, y'C06 = — 0,3643, для всех цепей z'C0 = 0;
– углы поворота плоскостей звеньев АВ, рад:
αAB1 = — 1,5708, αAB2 = 1,5708, αAB3 = 0,5236, αAB4 = — 3,6652, αAB5 = 2,6180, αAB6 = 5,7596.
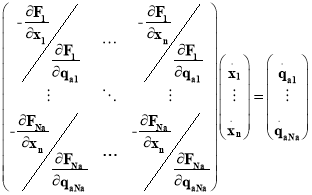
Для определения данных, необходимых для подбора червячного редуктора, был использован метод, базирующийся на матрице Якоби, так как практически для любого механизма параллельной структуры c n степенями свободы можно получить аналитические уравнения связи в виде n неявных функций Fi(x1,..., xn, qаi)(i=1...n) от координат выходного звена x1,...,xn и перемещений в активных парах qа1,...,qаn. В данном случае пренебрегаем инерцией по той причине, что в данном механизме нет больших ускорений. Тогда, дифференцируя по времени указанные выше функции, получим систему линейных уравнений:
![]()
Количество уравнений при этом равно числу степеней свободы механизма n, Na — число активных пар механизма. Указанная система в матричной форме после переноса в правую часть скоростей в активных парах q̇аi, будет иметь следующий вид:
 ,
,
или иначе
![]() .
.
В нашем случае функция F имеет выражение:
![]() .
.
А обратная матрица Якоби (размер 6 × 6):
![]()
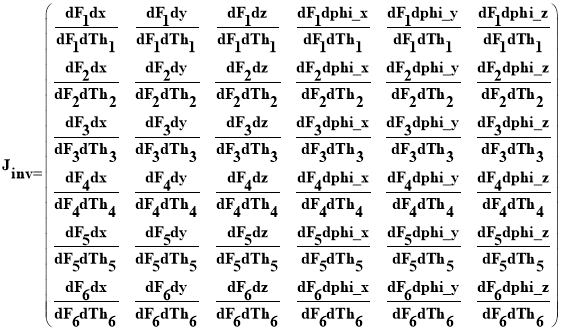
, где производные ![]() вычисляют в отдельной программе, представленной на рисунке 2. По индексу определяем значение координат и углов цепи, которые необходимо подставить в соответствующую производную).
вычисляют в отдельной программе, представленной на рисунке 2. По индексу определяем значение координат и углов цепи, которые необходимо подставить в соответствующую производную).

Рис.2. Программа вычисляющая производные
Для определения линейной скорости в приводах необходимо вычислить норму i-й строки с 1-го по 3-й элемент включительно, а угловой скорости с 4-го по 6-й включительно.
Например, для поиска линейной скорости 1-й цепи соответственно необходимо выполнить следующее:
![]()
По аналогичной зависимости рассчитываются скорости для других цепей. Из полученных значений линейных и угловых скоростей выбираем наибольшие и находим максимальную скорость вращения выходного вала. Для поиска усилий необходимо транспонировать матрицу Якоби, а дальше следовать тем же указаниям, что и для поиска скоростей в приводах. Фрагменты программ представлены на рисунке 3.
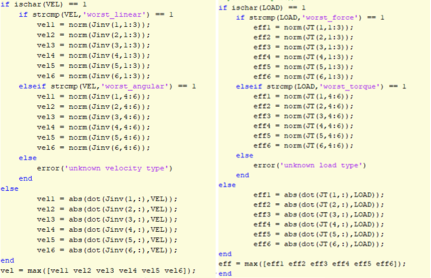
Рис. 3. Фрагменты программ для поиска скоростей и усилий
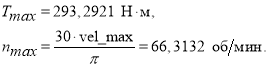
В результате анализа рабочей зоны, были получены следующие значения максимального момента и максимальной частоты вращения вала редуктора:
Литература:
- Ларюшкин П. А., Глазунов В. А., Эрастова К. Г. Определение максимальных усилий в приводах манипуляторов параллельной структуры по заданной величине внешней нагрузки. Машиностроение и инженерное образование, 2016, № 2(47), с. 40–46.
- Эрастова К. Г., Ларюшкин П. А. Рабочие зоны механизмов параллельной структуры и способы определения их формы и размеров // Известия высших учебных заведений. Машиностроение. — 2017. — № 8. — С. 78–87.
- Хейло С. В., Ларюшкин П. А., Глазунов В. Г., Эрастова К. Г. Определение рабочей зоны манипуляторов параллельной структуры. Справочник. Инженерный журнал с приложением, 2013, № 2(191), с. 27–31.

