





Работа стреловых грузоподъемных кранов связана с потенциальным источником опасности, который возникает в случае нарушения работоспособного состояния. Динамическая нагруженность является определяющим фактором при работе грузоподъемного крана. Перегрузка крана ведет к потере устойчивости и опрокидыванию. Это связано с недостаточностью соблюдения соответствия силовых параметров подъемных механизмов с динамическими свойствами привода механизмов подъема, а также погрешностями, возникающими при срабатывании ограничителя грузоподъемности [1; 2].
Для обеспечения требуемого уровня безопасности эксплуатации гидрофицированных кранов следует повысить уровень надежности срабатывания ограничителя грузоподъемности за счет снижения погрешности отключения крана. Для решения этой задачи требуется совершенствование системы защиты крана, учитывающей влияние времени работы гидротолкателя привода ограничителя грузоподъемности и быстродействие срабатывания [3; 4].
Это определило необходимость совершенствования системы защиты крана от перегрузки и опрокидывания путем разработки программного комплекса, позволяющего выполнять автоматическую оценку параметров и отработку заградительной характеристики ограничителей грузоподъемности с высокой степенью достоверности, а также обеспечить быстродействие отключения механизмов крана при перегрузке.
Цель работы: повышение надежности работы ограничителя грузоподъемности и безопасности эксплуатации гидрофицированных кранов в условиях перегрузки.
Современные грузоподъемные машины оснащены автоматическими системами для защиты от перегрузки и опрокидывания. В системе защиты гидрофицированных кранов используется отключение крана ограничителем грузоподъемности при повышении разности давления рабочей жидкости в поршневой и штоковой полостях гидроцилиндра подъема стрелы [5].
Анализ известного опыта автоматизации систем защиты с учетом современных требований безопасности эксплуатации гидрофицированных кранов показывает на необходимость совершенствования системы защиты крана от перегрузки и опрокидывания, путем разработки программного комплекса, позволяющего выполнять автоматическую оценку параметров и отработку заградительной характеристики ограничителей грузоподъемности с высокой степенью достоверности, а также обеспечить быстродействие отключения механизмов крана при перегрузке.
Усилие подъема груза равно грузоподъемности. Движение груза описывается уравнением гармонических колебаний. Уравнение подъема груза имеет вид:
![]() .(1)
.(1)
Полная нагрузка на крюк равна сумме статической и динамической:
 ,(2)
,(2)
где  — максимальный коэффициент динамичности.
— максимальный коэффициент динамичности.
Для снижения динамической нагрузки требуется гашение колебаний в системе.
Стабилизация гидродинамической силы в проточной полости гидротолкателя привода ограничителя грузоподъемности зависит от конфигурации проточной части подводящих каналов гидротолкателя. Для минимизации гидродинамической силы, оптимизации размеров профилированной части и влияния их на величину гидродинамической силы профилирование выполнено таким образом, что проточка в гидротолкателе имеет форму, выполненную по архимедовой спирали [6; 7].
Угол давления потока рабочей жидкости зависит от угла подъема спирали φ:
tg=![]() . (3)
. (3)
Угол подъема спирали определяется:
= ![]() , (4)
, (4)
где — глубина выемки.
Длина выемки золотника с профилем рабочей поверхности по архимедовой спирали определяется зависимостью
![]() , (5)
, (5)
где
Исследования колебательного процесса механизма подъема груза проводились на ЭВМ в редакторе Excel.
Варьированием параметров частоты колебаний и сопротивления в канате получены графики функций затухающих колебаний системы (рисунок 1).
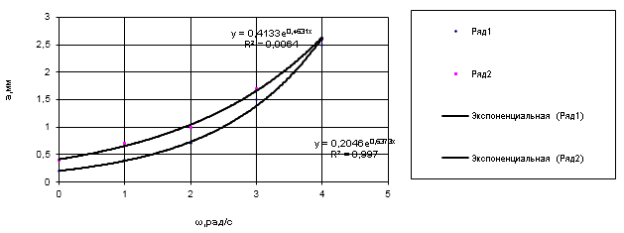
Рис. 1. Зависимости амплитуды от частоты колебаний груза: 1 — при β = 1,2 кНс/м; 2 — при β = 1,5 кНс/м
При круговой частоте ω = 3 с1 и демпфирующем сопротивлении β = 0,5 кНс/м амплитуда колебаний достигает А = 5,0 мм. Это в два раза превышает нормативное значение амплитуды. При увеличении параметра ω до 5 с1 и при прежнем значении β амплитуда снижается до 2,5 мм что соответствует нормативным требованиям. Такой же результат достигается при сочетании параметров β = 0,5 кНс/м и 2 с1. Сопротивление снижает амплитуду, частота колебаний действует обратно пропорционально.
Для определения влияния зазоров в механизме привода были проведены испытания крана с жестким компактным грузом при значениях суммарных зазоров — 0,002 м, 0,0035 м, 0.005 м. Испытания проводились с грузом массой 1000 кг при скорости подъема 0,85…0,95 м/с. Испытания показали, что с точностью до 10 % расчетные данные совпали с экспериментальными, в среднем коэффициент динамичности при увеличении зазоров до 0,005 м увеличивается до 30 %. «Жесткость» колебаний увеличивается за счет «перекладки» зазоров. В момент «перекладки» зазоров нагрузка падает почти до нуля, а затем резко возрастает в ту или другую сторону, частота колебаний при этом резко увеличивается и за счет амплитуд колебаний увеличивается коэффициент динамичности.
Режим сбрасывания груза в процессе подъема − это режим экстремальный, но этот режим иногда имеет место как аварийный, поэтому были проведены испытания крана в процессе сбрасывания груза при его подъеме с максимально возможной скоростью. Испытания проводились с жестким компактным грузом массой 500 кг. Груз подвешивался на электромагнитной защелке и в нужный момент (при достижении высоты подъема около 2 м) резко сбрасывался. В различные периоды цикла работы механизма подъема (пуск, установившееся движение, торможение) колебания груза, существенно разные и направлены как вдоль оси ОХ, так и вдоль оси ОУ.
Частота колебаний груза зависит от его массы, чем больше масса груза, тем меньше частота его колебаний, примерно в прямой пропорции. Увеличение скорости подъема груза также приводит к увеличению коэффициента динамичности, но в зависимости от массы груза. Чем больше масса груза, тем меньше влияние скорости подъема на динамические нагрузки. Соотношение статических и динамических нагрузок в механизме подъема такие же, как и в соприкасающихся с ними элементах конструкции при темпе включения двигателя 0,3…0,5 с, поэтому при определении динамических нагрузок в конструкции крана можно пользоваться теми же коэффициентами, учитывая время включения двигателя. Чем меньше время включения, тем быстрее разгон и тем «жестче» приложение динамических нагрузок.
На безопасность эксплуатации стреловых кранов влияет не только защита от предельных нагрузок, но и техническое состояние крана, которое во многом определяется грузовыми характеристиками.
Это условие выполняется путем программной реализации алгоритма управления устойчивости крана.
При срабатывании ограничителя грузоподъемности может наступить потеря устойчивости крана в двух вероятных случаях:
– усилие в канате больше допустимого (канат может оборваться);
– изгибающий момент в стреле больше допустимого (может разрушиться конструкция стрелы).
Исходя из поставленных условий:
![]() ;
; ![]() ,(6)
,(6)
где Рк, Рд − расчетное и допустимое усилие в канате; Мс, Мд − расчетный и допустимый грузовые моменты.
Вылет крюка стрелы L определяется по формуле:
![]() ,(7)
,(7)
где — угол подъёма стрелы, Lс — длина стрелы.
Используя эти неравенства проведена оценка параметров ограничителей грузоподъемностииполучены области допустимых значений Pк и .
Выводы
Выявлено влияние динамических характеристик кранов на колебательный процесс груза с учетом разных жесткостей канатно-блочной системы, влияющих на амплитудно-частотную характеристику, а также влияние коэффициента диссипации энергии на колебательный процесс.
Литература:
- Турышева, Е. С. Математическая модель рабочего процесса уплотняя-ющего оборудования машины. /А. П. Прокопьев, Е. С. Турышева // Известия вузов. Строительство. 1996. − № 7. С. 102−104.
- Турышева, Е. С. Автоматизированный стенд для настройки ограничителей грузоподъемности кранов. / Р. Т. Емельянов, А. П. Прокопьев, Е. С. Турышева. // Известия вузов. Строительство. 2001. − № 2–3. С.112–115.
- Турышева, Е. С. Оптимизация силовых характеристик дроссельных распределителей. / Р. Т. Емельянов, А. П. Прокопьев, Е. С. Турышева. //Известия вузов. Строительство. 2007. − № 12. С. 62−64.
- Емельянов Р. Т., Прокопьев А. П., Турышева Е. С., Постоев П. А. Реализация нейросетевого контроллера для управления организационно-технологическим комплексом // Вестник Сибирского аэрокосмического университета. 2011. Вып. 1. С. 20–24.
- Емельянов Р. Т, Спирин Е. С., Кириллов К. В., Циганкова А. В. Исследование автоматической системы управления с пропорционально-интегрально-дифференциальным регулированием// Вестник Красноярского государственного аграрного университета. № 10. 2013. с. 243–247
- Емельянов Р. Т., Султанов Н. С., Закурдаев А. В., Скурихин Л. В. Моделирование динамики регулируемого гидромотора // Вестник Красноярского государственного аграрного университета, № 8, 2014. с.181–185
- Терехова, И. И. Управление системой устойчивости башенного крана/ И. И. Терехова, Р. Т. Емельянов. // Совершенствование машин и ресурсосберегающих технологий: Межвуз. сб. науч. ст.- КФ Иркутский ГУПС, 2005. С. 36–44.
