




При выполнении работ в экстремальных условиях, когда окружающая среда опасна для человека, а характер выполняемых операций не позволяет полностью автоматизировать их выполнение, важную роль играют дистанционно управляемые манипуляционные роботы. Они дают возможность оператору выполнять требуемые операции, находясь в безопасном удалении от объекта работ.
Значительное повышение эффективности работы дистанционно управляемых манипуляционных роботов может быть достигнуто при использовании вычислителей, обеспечивающих управление приводами манипулятора, т. е. при полуавтоматическом управлении. Человек-оператор при этом с помощью многостепенного задающего устройства управляет движением схвата манипулятора. Работать человеку-оператору с такими системами существенно легче по сравнению с манипуляционными системами копирующего типа. Появляется возможность использовать различные алгоритмы управления. Конструкция задающего устройства становится независимой от кинематической схемы исполнительного органа.
Среди различных операций, которые необходимо выполнять с помощью манипуляционных роботов, существует ряд таких, осуществление которых невозможно без восприятия оператором сил и моментов, действующих на схват со стороны объекта манипулирования. Для подобных операций применяются системы двустороннего действия, т. е. системы, в которых предусматривается воспроизведение на задающем устройстве сил и моментов, пропорциональных действующим на манипулятор. Наибольшее распространение получили системы двустороннего действия копирующего типа. Принцип двустороннего действия может быть использован в полуавтоматических системах управления манипуляционных роботов. В таких системах для обеспечения силовой обратной связи используется многостепенной датчик сил и моментов, действующих на схват манипулятора, устанавливаемый в его «запястье». Для выполнения необходимых преобразований сигналов датчика и получения управляющих сигналов на силовые элементы задающего устройства необходимо применение вычислителя.
Таким образом, на вычислительное устройство, входящее в состав полуавтоматической манипуляционной системы с силовой обратной связью, возлагаются формирование управляющих сигналов на приводы манипулятора в зависимости от сигналов, вырабатываемых оператором на задающем устройстве, и формирование сигналов на силовые элементы задающего устройства. Эти задачи независимы, так как коррекция управляющих сигналов на основе сигналов обратной связи осуществляется человеком-оператором и каждая из них может быть решена с помощью одной программы.
Итак, основными особенностями вычислителя в полуавтоматической системе управления с силовой обратной связью являются: работа в реальном масштабе времени; работа в однопрограммном режиме; выполнение двух независимых задач. Вследствие этого для создания системы управления целесообразно использовать два программируемых или специализированных микропроцессора.
Функциональная схема полуавтоматической манипуляционной системы с силовой обратной связью показана на рис. 1, где приняты следующие условные обозначения: ЗУ — задающее устройство; ИУ — исполнительное устройство (манипулятор); УП — устройство преобразования аналог — цифра, цифра — аналог; БУ — блок усилителей приводов исполнительного устройства; ДМ — датчик сил и моментов; 1 — управляющий микропроцессор; 2— микропроцессор в цепи силовой обратной связи; ОС — обратная связь.
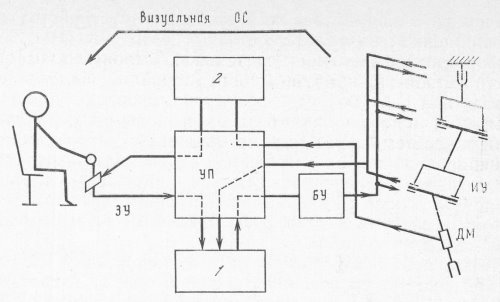
Рис. 1. Функциональная схема системы
Микропроцессоры 1 и 2 в такой системе работают независимо друг от друга. Первый пересчитывает сигналы задающего устройства в сигналы управления приводами манипулятора, используя также информацию, получаемую от датчиков положения и скорости в степенях подвижности исполнительного устройства. Второй формирует сигналы на силовые элементы задающего устройства на основе сигналов, поступающих от датчика сил и моментов через устройство преобразования.
Управление манипулятором целесообразно организовать по принципу комбинированного управления, позволяющего изменять способ управления в зависимости от решаемой задачи. Примером алгоритма комбинированного управления служит позиционно — скоростной алгоритм.
Второй микропроцессор решает две задачи — преобразование сигналов датчика, получаемых в системе координат, связанной со схватом манипулятора, в сигналы, соответствующие системе координат, связанной со стойкой манипулятора; задачу формирования управляющих сигналов на силовые элементы задающего устройства. Связывая определенным образом системы координат OiXiYiZi(i =1, 2,..., п) с каждым из звеньев манипулятора, нетрудно составить ортогональную матрицу перехода от п-й системы, связанной со схватом, к системе, связанной со стойкой:
где ![]() — матрица перехода от системы координат OiXiYiZi к системе Oi-1Xi-1Yi-1Zi-1. Вычисление этой матрицы позволяет определить векторы сил и моментов в неподвижной системе координат
— матрица перехода от системы координат OiXiYiZi к системе Oi-1Xi-1Yi-1Zi-1. Вычисление этой матрицы позволяет определить векторы сил и моментов в неподвижной системе координат ![]() по показаниям датчика
по показаниям датчика ![]() и
и ![]() . Вторая задача сводится к формированию сил и моментов, которые должны быть воспроизведены на задающем устройстве, по формуле
. Вторая задача сводится к формированию сил и моментов, которые должны быть воспроизведены на задающем устройстве, по формуле
![]()
где ![]() — обобщенные координаты задающего устройства;
— обобщенные координаты задающего устройства; ![]() — соответствующая матрица Якоби, которая может быть существенно упрощена за счет удачного выбора конструкции рукоятки;
— соответствующая матрица Якоби, которая может быть существенно упрощена за счет удачного выбора конструкции рукоятки; ![]() .
.
Основная трудность, возникающая при проектировании системы управления, состоит в том, что все вычисления должны проводиться в реальном масштабе времени.
Необходимое быстродействие управляющего микропроцессора может быть обеспечено за счет выбора достаточно простого алгоритма управления.
Программа микропроцессора в цепи силовой обратной связи предопределена кинематическими схемами исполнительного и задающего устройств, однако точность представления информации здесь определяется возможностями человека-оператора воспринимать силовые воздействия.
Для анализа этих характеристик были предприняты специальные исследования. Оценка точности восприятия оператором силы проводилась при разбиении диапазона предъявляемых сил (8–25 Н) на 3, 4, ..., 8 равных интервалов. На рис. 2 показаны полученные зависимости вероятности ошибки р и времени опознания значения силы от числа разбиений N.Вероятность ошибки возрастает с увеличением числа возможных значений силы. Для уверенного распознавания значения силы необходимо не более шести градаций.

Рис. 2. Оценка точности восприятия оператором силы
Исследования точности восприятия направления силы проводились аналогично [2]. На рис. 3 показана зависимость вероятности ошибки от количества предъявляемых оператору направлений. Они соответствуют делению окружности на 4, 6, 8, 12 равных частей. Из графика видно, что уверенное различение направления происходит при делении окружности не более чем на 12 частей, что соответствует шести градациям с учетом знака.
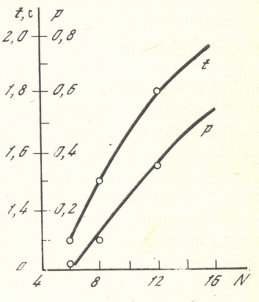
Рис. 3. Зависимость вероятности ошибки от количества предъявляемых оператору направлений
Таким образом, достаточная точность предъявления как значения, так и направления силы обеспечивается четырьмя разрядами, включая знаковый.
Отметим, что требования к микропроцессору 2 (см. рис. 1) по точности существенно ниже, чем к микропроцессору 1. Однако требования к быстродействию второго микропроцессора весьма высоки, поскольку оператор должен мгновенно реагировать на препятствия или иные внешние силы, возникающие при работе манипулятора, причем латентный период реакции механорецепторов весьма низок.
Несмотря на ограниченные возможности оператора по восприятию силовой информации, полуавтоматическая система управления манипулятором с силовой обратной связью позволяет выполнять весьма сложные операции, сопровождающиеся возникновением непредвиденных внешних сил, в том числе различные сборочные операции, операции с кинематически связанными объектами. Это объясняется более полным согласованием возможностей оператора и технической части системы, обеспечиваемым с помощью микропроцессоров.
Литература:
- Письменный Г. В. Позиционно-скоростной метод управления манипулятором. — Изв. АН СССР. Техн. Кибернетика, 1976, № 3.
- Ефремов Е. В., Сметанко В. Е., Шнейдер А. Ю., Ющенко А. С. Исследование манипуляционной полуавтоматической системы двустороннего действия. — В кн.: II Всесоюз. Межвуз. науч.-техн. конф. «Робототехнические системы», Киев, 1980. Киев: Киев, политехн. ин-т, 1980, кн. 1.
