




Currently, the question of robotics in the construction industry. Robots will be able to build a building automatically without human intervention. With the construction of buildings construction of robots will be high-quality and fast.
Keywords: robot, construction, dynamometer platform sensors.
Каждый день в мире строится большое количество домов и кирпичных зданий. На стройках работают огромное количество людей, подвергаясь большим нагрузкам. Профессия строителя нелегка.Постоянные физические нагрузки, множество вредных технологических факторов, вредно влияющих на здоровье рабочих — все это не избавляет нас от возрастающего спроса на жилье, которое никто кроме каменщиков и штукатуров строить не будет.Представляю вашему вниманию робота, который способен стоить любую архитектурную конструкцию. Система облегчит труд рабочих, удешевит цены на жилье. Робот сможет заменить большое количество человек и справится с работой в 20 раз быстрее. [3]

Рис.1. Робот-строитель с динамометрической платформой
В конструкции присутствует промышленный манипулятор на мобильной платформе. С помощью них он становится универсальным и самостоятельным. Также робот будет оснащаться лазерном дальнометром с помощь которого он сможет создавать 3D карты местности. Карта помогает ему ориентироваться на местности и перемещаться по строительной площадке без помощи людей. Система оснащена рядом датчиков измеряющие расстояние.
В роботе присутствует сенсорная система, которая влияет на алгоритм информации, получаемой от датчиков, и соответственно, на время вычисления параметров, необходимых для полного определения исходной программы движений. Организация сенсорной системы включает следующее:
‒ схема размещения элементарных датчиков в сенсоре;
‒ место сенсора в робототехнической системе;
‒ число установленных датчиков;
‒ дискретность пространственного расположения датчиков
Первые два фактора влияют на «глубину» вычислительных процедур, т. е. на сложность и число необходимых преобразований. Вторые два фактора определяют количество информации, доставляемой системой датчиков, т. е. ее размерность.
Чтобы уточнить влияние факторов на алгоритмы обработки информации, рассмотрим размещение силомоментных датчиков для определения массы робота и абсолютных координат его центра тяжести.
Силоизмерительные датчики мы разместили вне робота на основании и объединили в специализированное устройство, называемое динаметрической платформой. Платформа представляет собой жесткую плиту, подвешенную на упругих опорах, оснащенных датчиками силы. По отношению к рассмотренным способам организации систем силомоментного очувствления, динамометрические платформы выделяются повышенной точностью измерений и простой обработки информации для получения параметров силового взаимодействия робота с внешней средой. [1]
Шестикомпонентная платформа позволяет определить модуль и абсолютные координаты точки приложения результирующей силы при произвольной нагрузке на платформу. При определении координат центра тяжести объекта, устанавливаемого на платформу, можно обойтись меньшим числом измеряемых компонентов, поскольку при получения этой информации не нужен момент относительно вертикальной оси.
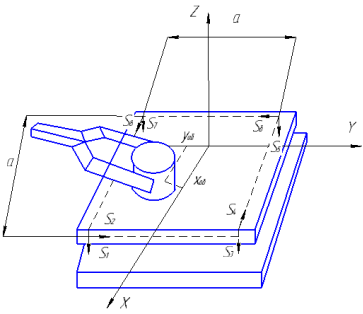
Рис. 2. Схема размещения силометрических датчиков для получения информации о массе и положении объекта с помощью силоизмерительной платформы
Общая схема динамометрической платформы, установленной на четыре симметричные опоры, с двухкомпонентными датчиками представлена на рис.2. При установке объекта датчики зафиксируют 8 составляющих нагрузки ![]() Для вычисления компонентов нагрузки в абсолютной системе XYZ используют простые соотношения
Для вычисления компонентов нагрузки в абсолютной системе XYZ используют простые соотношения
![]() , [2]
, [2]
![]()
![]()
![]()
![]()
где a — расстояние между опорами. Искомая масса и координаты центра тяжести объекта можно получить из следующих формул
![]()
![]()
![]()
![]()
При необходимости захватить объект, установленный на платформе по полученным координатам xоб, yоб, zоб, решается обратная задача о положениях-вычисляются обобщенные координаты звеньев робота и осуществляется требуемое движение. Если объект несимметричен относительно линии действия силы тяжести, то дополнительную информацию об ориентации объекта и о месте его захвата получают с помощью дополнительных локационных средств, размещенных на схвате робота.
Строительная отрасль станет наиболее продвинутой в техническом плане, используя данный робот. С помощью него можно быстро и качество возводить сложные конструкции, тратя на это малое количество времени. Робот оснащен специальными датчиками, которые более точно обрабатывают информацию и передают ее в процессор машины, тем самым повышая качество выполняемой работы.
Литература:
- Поезжаева Е. В. Промышленные роботы: учебное пособие в 3 ч. — М.; УМО АМ МВТУ им. Баумана; изд-во ПГТУ, 2009.
- А. И. Корендясев, Б. Л. Саламандра, Л. И. Тывес. Теоретические основы робототехники; Книга 1; изд-во Наука, 2006.
- http://gooodnews.ru/index.php/pozitivnoe/good-news/4995-izobreten-robot-stroitel-dlya-vozvedeniya-kirpichnykh-zdanij.
